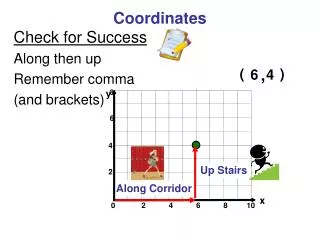
Coordinates
Coordinates. A basis is a set of elements that generate a group or field. Groups have a minimum set that generates the group. Cyclic groups have a single element basis. Vector spaces use the scalars and basis vectors to generate the space. Example A basis B i for M 2 ( R ) is


Coordinates
E N D
Presentation Transcript
A basis is a set of elements that generate a group or field. Groups have a minimum set that generates the group. Cyclic groups have a single element basis. Vector spaces use the scalars and basis vectors to generate the space. Example A basis Bi for M2(R) is The vector equation has only one solution so they are linearly independent. Basis
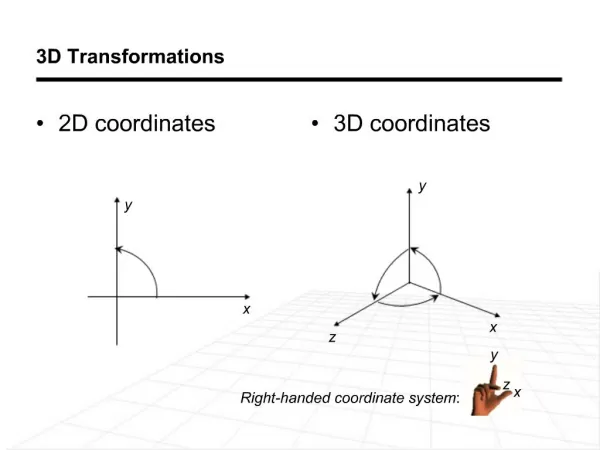
Cartesian Coordinates • Three coordinates • x1, x2, x3 • Replace x, y, z • Usual right-handed system • A vector can be expressed in coordinates, or from a basis. • Unit vectors form a basis x3 x2 x1 Summation convention used
Vector algebra requires vector multiplication. Wedge product Usual 3D cross product The dot product is also defined for Cartesian vectors. Kronecker delta: dij = 1, i = j dij = 0, i ≠ j Permutation epsilon: eijk = 0, any i, j, k the same eijk = 1, if i, j, k an even permutation of 1, 2, 3 eijk = -1, if i, j, k an odd permutation of 1, 2, 3 Cartesian Algebra
Coordinate Transformation • A vector can be described by many Cartesian coordinate systems. • Transform from one system to another • Transformation matrix L x3 x2 x1 A physical property that transforms like this is a Cartesian vector.
Transformation and inverse qm = qm(x1, x2, x3, t) xi = xi(q1, q2, q3, t) Generalized coordinates need not be distances. For a small displacement a non-zero determinant of the transformation matrix guarantees an inverse transformation. For a small displacement If Then the inverse exists General Transformation
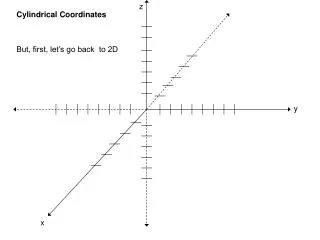
Polar-cylindrical coordinates r: q1 = (x1 + x2)1/2 q: q2 = tan-1(x2/x1) z: q3 = x3 Spherical coordinates r: q1 = (x1 + x2 + x3)1/2 q: q2 = cot-1(x3/ (x1 + x2)1/2) f: q3 = tan-1(x2/x1) Translation with constant velocity q1 = x1 – vt q2 = x2 q3 = x3 Translation with constant acceleration q1 = x1 – gt2 q2 = x2 q3 = x3 Other Coordinates
Constraints • Coordinates may be constrained to a manifold • Surface of a sphere • Spiral wire • A function of the coordinates and time: holonomic • f(x1, x2, x3, t) = 0 • If time appears the constraint is moving. • If time does not appear the constraint is fixed. • Non-holonomic constraints include terms like velocity or acceleration.
System of Points • Coordinates with two indices: xri • r represents the point • i represents the coordinate index (use i through n) • A rigid body has k holonomic constraints. • fj(xri, t) = 0 • System has f = 3N – k degrees of freedom next