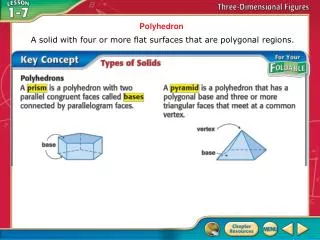
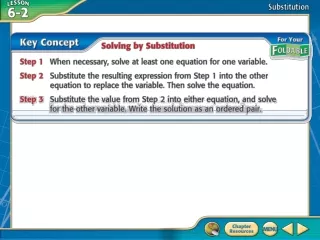
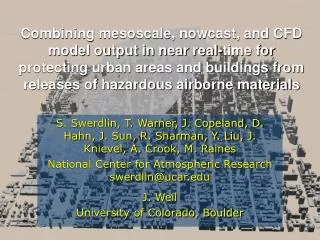
Integrating Mesoscale, Nowcast, and CFD Models for Urban Hazardous Material Detection
This project combines models to predict urban wind behavior and track hazardous airborne materials in real-time, aiding evacuation and recovery operations.

Integrating Mesoscale, Nowcast, and CFD Models for Urban Hazardous Material Detection
E N D
Presentation Transcript
Combining mesoscale, nowcast, and CFD model output in near real-time for protecting urban areas and buildings from releases of hazardous airborne materials S. Swerdlin, T. Warner, J. Copeland, D. Hahn, J. Sun, R. Sharman, Y. Liu, J. Knievel, A. Crook, M. Raines National Center for Atmospheric Research swerdlin@ucar.edu J. Weil University of Colorado, Boulder
Concept • Combine models at various scales to provide detailed urban wind field awareness • Develop hazardous material sensor network and algorithms to detect and track airborne releases • Detect a release, characterize source, and use transport and dispersion model with time-varying 3-D urban wind field to predict path and concentration of material
Goals • Provide early detection and warning of hazardous airborne releases • Aid evacuation and recovery operations by proving better information to decision makers • Dual use: Monitor and reverse-locate sources of industrial pollution; support fire fighting and flood management
Computing urban wind fields • NCAR developing operational system in Washington, DC: three models used to compute “rooftop” fields • RTFDDA: MM5-based Real-Time Four-Dimensional Data Assimilation • VDRAS: Variational Doppler RADAR Assimilation System • VLAS: Variational LIDAR Assimilation System • Blend these onto a common grid • Use blend to provide initial and lateral boundary conditions for city- and building-aware models
TAMDAR LIDAR SURFACE OBS SATELLITE UPPER AIR RADAR “Rooftop” model 1: MM5-based RT-FDDA e.g., new 6 h forecast every 30 min at 500 m res, using real-time obs time RT- FDDA Forecast QuickSCAT scatterometer
RADAR/LIDAR assimilation system. • Uses 4 Dimensional Variational Assimilation (4DVAR) to retrieve 3-D winds from Doppler radar/lidar Radial winds Desired 3-D winds Rooftop models 2&3: VDRAS and VLAS RADAR LIDAR
Example: VDRAS coupled to plume model VDRAS wind vectors show convergence line below formation of thunderstorm cells
Example 1: VDRAS coupled to plume model (cont) Emergency response application. Two simulated releases 30 minutes apart: plume model coupled to VDRAS winds Wash. D.C. 1629 LT release 1557 LT release Release height – 10 m 1 kg inert, nonbuoyant gas 15 June 1998
skimming flow models L = 1-10 km L = 10-100 km L = 10-1000 km RT-FDDA VDRAS VLAS Spatial-temporal blending scheme skimming flow master grid (updated every 5 mins)
skimming flow master grid (covers large urban area) Provides 3-D, time-varying, initial, and lateral boundary conditions to building-aware models, every 5 minutes Urban canopy flow: 10 x 10 km tiles Building flow: 1.5 x 1.5 km tiles CFDRC’s CFD-Urban, updated every 10 mins LANL’s QUIC-Urb, updated every 5 mins L = 2-5 m L = 10-20 m
Example 2: VLAS applied at the neighborhood scale Notional plume CTI Doppler lidar
VLAS wind vectors in Washington, D.C., 7 May 2004, day time Storm to the NE
Sensitivity of simulated plume prediction to atmospheric stability conditions Neutral/Convective atmosphere Stable atmosphere
Using high-resolution winds to compute “threat zone” in near real-time e.g., agent released at X would require 1 min to impact the target x X X 1 km t – 1 m t – 3 m
Concept: continuously map and detect plumes with rooftop LIDAR network Continuously collected LIDAR output, and examine for presence of unusual plumes
T+140s T+100s T+160s T+120s T+180s Simulation of rooftop lidar’s view of point-source hazardous agent release in mild haze T+60s T+80s T+20s T+40s T+0s T+240s T+220s T+200s
Conclusion • Scheme of creating multi-resolution “rooftop” blend, and using this to provide background and forcing conditions for building-aware models seems to be effective • More verification is needed to determine skill of urban coupled NWP plume-model system