REMOTE SENSİNG APLICATIONS IN RAİN
REMOTE SENSİNG APLICATIONS IN RAİN. MEHMET SUR 110020219. Passive Microwave Rain Rate Remote Sensing . Remote sensing of precipitation and clouds.


REMOTE SENSİNG APLICATIONS IN RAİN
E N D
Presentation Transcript
REMOTE SENSİNG APLICATIONS IN RAİN MEHMET SUR 110020219
Passive Microwave Rain Rate Remote Sensing Remote sensing of precipitation and clouds
Rain is the main source of pure water in the world. It is the cause for two extreme problems of drought and floods. Thus the need for proper management of rain water arises. Remote sensing plays good role in this respect. • Rainfall occurring at a place can broadly be divided into three categories based on their intensity and duration, namely light showers, heavy showers and storms. In all these situations rainwater has to be managed properly. When there is a light shower, the rain water has to be captured at the site where it falls and when there is heavy showers, runoff has to be prevented. When there is a heavy storm, we have to prevent flooding and protect the properties from being damaged by the flood water.
Microwave Remote Sensing from Space Advantages Disadvantages • Penetration through non-precipitating clouds. • Highly stable instrument calibration. • Radiance is linearly related to temperature (i.e. the retrieval is nearly linear). • O2 is uniformly mixed gas throughout the atmosphere. • Larger field of views (10-50 km) compared to vis/IR. • Variable emissivity over land. • Polar orbiting satellites provide discontinuous temporal coverage.
Why do We Need Observations in Lower Troposphere? The planetary boundary layer contains the for weather Convective events in well mixed layer during daytime heating Fog and low clouds under nocturnal inversion Layer of air containing the roots of summertime convection Low-level jet Depth of cold air in winter to tops of stratocumulus
History and Future of Passive Microwave Earth Observation • NASA 1970-1987 Nimbus satellite ESMR-1, ESMR-2, SMMR • NOAA 1978-1999 POES MSU, 1999-present POES AMSU • DMSP 1982-present SSM/T 1987-present SSM/I, 1991-present SSM/T2, 2004-2015? SSMIS • NASDA 1997-present TRMM TMI & PR, 2002-present Aqua AMSR, 2003-present ADEOS-2 AMSR • NPOESS 2007-2030? CMIS
Satellite imagery can provide potential solution to the monitoring of large-scale systems e.g. super-cell thunderstorms, depressions, cyclones, or me-soscale convective complex, particularly those in remote areas where there are sparse numbers of weather stations. The movement and patterns of clouds, observed from satellite images, can be used to indicate the instability of the weather. Moreover, useful information about rain clouds can be derived or inferred: cloud depth, cloud droplet size from visible (VIS) channels, cloud top tem-perature and height from infrared (IR) channels, and cloud phase from water vapour (WV) channels. • Each cloud type produces different amounts and types of rain e.g. stratiform clouds, which have small vertical velocities, produce low rain rates but widespread (~100 km) whereas convective clouds which have intermittently strong vertical velocities (> 1 m/s) give high rain rates (>5 mm/h) and intense. Thus, the significant process of rain estimation is to select image features that can distinguish these two groups of clouds and then determine the relationship between these features and rain rate.
Precipitation—Theory/Basis • Visible (VIS)/Infrared (IR) Algorithms • Basic assumption is that cloud-top temperature brightness is related to cloud height, which in turn is related to cloud thickness, and to rainfall rate • Colder, brighter clouds are associated with heavier rain • Warmer, less bright clouds are associated with light or no rain • Reasonable assumption for convective clouds • Poor assumption for • stratiform clouds (warm, but wet) • cirrus clouds (cold, but rain-free)
Cirrus Tb=210 K Cumulonimbus Tb=200 K Nimbostratus Tb=240 K 200 250 290 Illustration of the IR signal from different cloud types T (K)
Precipitation—Theory/Basis • Microwave (MW) Algorithms • Scattering: ice in clouds scatters (warm) terrestrial radiation downward, producing cold areas in imagery. • Rainfall rates are related to the magnitude of the resulting brightness temperature depression. • Strength: can be applied to high-frequency channels where surface effects are not detected: works over both land and ocean • Weakness: poor at detecting precipitation clouds with little or no ice (e.g. warm orographic clouds in the tropics)
Precipitation—Theory/Basis • Microwave (MW) Algorithms • Emission: water in clouds emits radiation, can be seen against a radiatively cold background (i.e. oceans). • Rainfall rates are related to the magnitude of the resulting brightness temperature difference • Strength: Sensitive to clouds with little or no ice • Weakness: must know terrestrial radiances without cloud beforehand; generally applicable over oceans but not land
Lower Tb above cloud Higher Tb above clear air Higher Tb above cloud Lower Tb above clear air High ε Low ε Land (Scattering) Ocean (Emission)
Precipitation—IR/VIS vs. MW • Physical Robustness: • Microwave radiances are sensitive to moisture throughout the cloud • IR/VIS data reflect cloud-top conditions only and thus are more weakly related to actual rainfall rates over a wider range of conditions than MW radiances. • Space/Time Resolution • IR/VIS data are available at 4 km/1km resolution (GOES) on geostationary platforms, allowing looks in many locations every 15 minutes—suitable for extreme precipitation events at short time scales • MW instruments are presently restricted to polar-orbiting platforms, limiting views to 2 per day per satellite—more suitable for larger scales in time and space
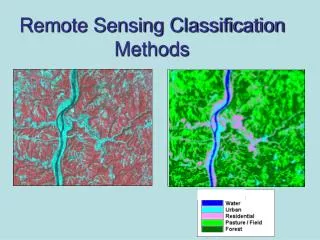
CLOUD DETECTION METHODS: 1. Maximum Temperature -- all observations of a small surface area over a relatively short period of time are compared. The highest temperature is retained as the best estimate of temperature in that area. This method is based on a) ocean surface features are more persistent than clouds b) clouds are colder than the surface. NOTE: This method works poorly for persistent, thin clouds. 2. Two Wavelength Infrared -- compare temperatures from 3.7 μm and 10.5 μm (or any pair of wavelengths in the window. If the temperatures are the same, then one can assume the measured signal came from a) the sea surface, OR b) uniform clouds, which will probably be detected in a visual image of the area of interest. If the temperatures at the two wavelengths are different, then there are scattered, undetected clouds in the scene.
3. Infrared Variability -- temperatures of clouds tend to be much more variable in space than temperature of the sea surface. Therefore, all areas having a small deviation from a mean brightness temperature close to that expected of the sea in the region are accepted as good values. 4. Two Wavelength Visible-Infrared -- uses reflected sunlight to detect clouds on the assumption that the sea is much darker in visible wavelengths than clouds.
Due to the high correlation between cloud motion and how rain moves, clouds motion vectors can be added to predict rainfall. In operational process, atmospheric motion vector (AMV) can be derived using crosscorrelation techniques, which search for the best match of an object-of-interest in the target area. However, the result is a displacement, not the velocity in 3D space. To obtain the velocity, optical flow techniques which apply a fluid dynamics constraint to the search can be used. In addition, the spiral movement equation can be added to improve the motion vectors
H-E—Example 24-h Total Ending 1200 UTC 7 October 2003
IR Algorithms: GMSRA • GMSRA=GOES Multi-Spectral Rainfall Algorithm • Uses Data from 4 Different Channels: • Visible (0.69 μm)—discriminate between thin (nonraining) cirrus and thicker (raining) clouds • “Short” IR Window (3.9-μm)—use reflectivity to identify clouds that are warm but have large particles near cloud-top and are thus producing rain • Water Vapor (6.7-μm)—warm signature above overshooting cloud tops differentiates from cirrus • IR Window (10.7-μm)—texture screening of cirrus clouds (low texture=cirrus; high texture=rain) and calculation of rainfall rate (but dependent only on value at pixel of interest)
GMSRA—Example 24-h Total Ending 1200 UTC 6 October 2003
MW Algorithms—AMSU-B • AMSU=Advanced Microwave Sounding Unit • Single scattering algorithm over both land and ocean: difference between brightness temperatures at 89 and 150 GHz is related to rainfall rate • Maximum rain rate of 35 mm/h • Approximately 16-km horizontal resolution • Available 6 times per day (~0130, 0730, 1030, 1330, 1930, and 2230 Local Standard Time); estimates produced globally as data become available • Contact: Ralph Ferraro at Ralph.R.Ferraro@noaa.gov
AMSU-B—Example NOAA-16 Rain Rate at 1330 LST 7 October 2003
Forecasting Tools: TRaP • TRaP=Tropical Rainfall Potential—24-hour precipitation forecast • Produced by extrapolating microwave-based instantaneous precipitation estimates along the predicted storm track • Forecasts produced automatically whenever a new microwave image or track forecast becomes available—posted in Web in graphic format
TRaP—Example(Hurricane Claudette) TRaP Forecast Radar-Raingauge Blend Pre-landfall TRaP for the 24 h ending 1200 UTC 16 July 2003
TRaP—Example TRaP for Tropical Cyclone Manou—1815 UTC 8 May 2003
Automated Snow Cover—Example NOAA-16 AMSU Snow Cover at 1330 LST 9 October 2003
Surface Wetness—Example Surface Wetness and Precipitation 24-h Change in Surface Wetness NOAA-16 AMSU Wetness Products for 9 October 2003
TROPICAL CYCLONE RITA (Example of MODIS products, King et al.)
Abbreviation Frequency (GHz) Resolution(km) 19V 19.35 70x45 19H 19.35 70x45 22V 22.235 60x40 37V 37.0 38x30 37H 37.0 38x30 85V 85.5 16x14 85H 85.5 16x14 DMSP SSM/I Sensor • Flown on DMSP F8 - F15 • It is a conical scan sensor.
NOAA AMSU Sensor • Flown on NOAA-15 (May 1998) and NOAA-16 (Sept. 2000) satellites • Contains 20 channels: • AMSU-A • 15 channels • 23 – 89 GHz • AMSU-B • 5 channels • 89 – 183 GHz • 6-hour temporal sampling: • 130, 730, 1330, 1930 LST
AMSU-A and –B Scan Pattern • Cross-track scan geometry • AMSU-A (30 FOV/scan; 48 km @ nadir) • AMSU-B (90 FOV/scan; 16 km @ nadir) • 2200 km swath width
Precipitation MonitoringTornadic Storm on Sept 24 2001 AMSU NEXTRAD
AMSR image of Typhoon 6 June 17, 2003
Conclusion • Passive microwave remote sensing has a unique capability to detect rain and estimate rain rates from orbit. • This complements ground based weather radar and precipitation measurements. • Algorithms work over water, may extend to land with more advanced sensors. • Satellite data from multiple systems can be used to get greater integration time, provide a more complete depiction of rain rate through the day and prediction of severe rain events.