Metrics in Formal Verification: Exploring Coverage Heuristics
270 likes | 311 Vues
Learn about coverage metrics in formal verification, explore different types of coverage metrics, understand the importance of high coverage, and study motivating examples and previous works in this field. Dive into state-based, logic-based, and simulation-based coverage approaches.

Metrics in Formal Verification: Exploring Coverage Heuristics
E N D
Presentation Transcript
Coverage Metricsin Formal Verification Hana Chockler Hebrew University
Plan of the Lecture • Coverage in simulation-based verification • Motivation • Coverage metrics • Other directions of research • Summary
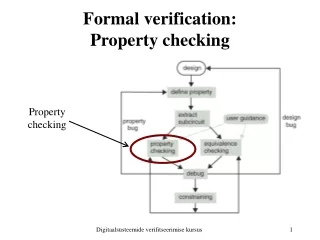
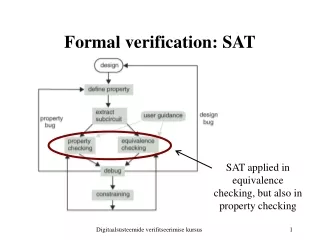
MODEL counterexample p p p Model Checker specification Motivation Fix the model/specification NO YES Should I really believe this? Did I check what I meant to check? Did I check everything that I meant to check?
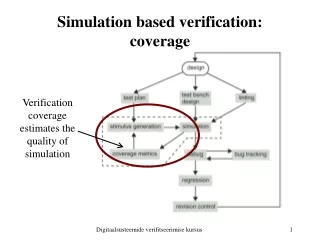
What is coverage in model checking? Coverage in Simulation-Based Verification • Coverage metrics are heuristic measures of comprehensiveness of a given test. • Different coverage metrics: • Code-based. • Circuit structure-based. • Functionality-based. • etc. • High coverage indicates that fewer bugs remained. In model-checking we may visit all states. Does it mean that coverage is always 100% ? Measures the percentage of code executed by the test. Measures the percentage of gates visited during the test. Measures the percentage of functionality checked by the test.
request grant There are two grants for one request!!! grant grant grant Motivating Example System Specification This problem can be discovered by studying the effect of local mutations of the system on the satisfaction of the specification. The system satisfies the specification every request is eventually granted In temporal logic: What is wrong with the system?
request grant There are two grants for one request!!! grant grant grant * request * grant Motivating Example (cont.) System This problem can be discovered by studying the effect of local mutations of the system on the simulation relation with the design. Specification The system is simulated by the design every request is eventually granted Simulation of the system by the specification As a high-level design
The idea: • Introduce a small mutation in the system. • Check whether the mutant system is still correct with respect to the specification. • If yes – this mutation is not covered by the specification. • Output the list of uncovered mutations. Previous Work • Y.Hoskote, T.Kam, P.-H.Ho, X.Zhao. • “Coverage estimation for symbolic model checking”. • For subset of ACTL. • Observability transformation applied to the specification, implying syntax-dependent algorithm. • Linear in the specification and the system. • Implementation revealed a bug in a priority buffer! • S.Katz, D.Geist, O.Grumberg. “Have I written enough properties?” • For ACTL safety formulas. • Checking bisimulation between the system and the reduced tableau of the specification. • Exponential in the (entire) specification.
Input signals request Control signals serve coffee serve tea Output signals Our ContributionDefinitions of coverage[Chockler, Kupferman, Vardi ‘01] • Distinction between input, output, and control signals: • Coverage cannot be measured with respect to input signals, since we cannot affect their values. • Changing the value of a control signal affects both the label and the transition relation. • Changing the value of an output signal affects only the labeling of a state. 00 Request for coffee Request for tea 01 10
00 Request for coffee request Request for tea 01 00 serve coffee Request for coffee request Request for tea 01 serve coffee 00 00 Request for coffee Request for coffee request request Request for tea Request for tea Flipping “serve tea” in the state 10 Fixing x to 0 everywhere Flipping x in the state 10 01 01 10 10 serve coffee serve coffee serve coffee serve tea Original system Mutant system Mutant system Mutant system Definitions of coverage [CKV01] • State-based versus logic-based coverage: • In state-based coverage we study the effect of changing the value of one signal in one state. • In logic-based coverage we study the effect of fixing the value of one signal everywhere. Control signals are x and y State-based coverage Logic-based coverage
There is no direct correlation between node-based and structure-based coverage! q Mutant structure Mutant tree Definitions of coverage [Chockler,Kupferman,Kurshan,Vardi ‘01] • Different types of mutations with respect to unwinding the structure to an infinite tree: • Node-based coverage: the value of a signal is changed in one occurrence of a state in the infinite tree. • Structure-based coverage: the value of a signal is changed in all the occurrences of the same state in the tree. • Tree-based coverage: the value of a signal is changed in a subset of the occurrences of a state in the infinite tree. Satisfies “Eventually q” Does not satisfy“Always q or always not(q)” Does not satisfy“Eventually q” Satisfies“Always q or always not(q)” unwinding q q
a covered mutation a b b * simulation b b b uncovered mutation Definitions of coverage[Chockler, Kupferman ‘02] • Coverage with respect to simulation: • A specification is given as a high-level design. • A correct implementation is simulated by the design. • A mutation is covered if it is no longer simulated by the design. Implementation Specification
Naive Algorithms forCoverage Computation Checks each mutation separately. number of mutations = number of states X number of signals • Complexity: • For CTL specifications: quadratic in the size of the structure and linear in the size of specification • For LTL specifications: quadratic in the size of the structure and exponential in the size of specification • For simulation: cubic in the size of state space
Improving Average Complexity Mutations differ from each other only slightly much of the model-checking or simulation can be done once • Incomplete labeling function permits to label the states with variables. • Different assignments to the variables represent different mutations. • A part of model-checking (or simulation) can be performed without assigning the variables. • The rest can be performed in steps, each time assigning half of the variables.
Improving Average Complexity Applications [CKV01] • Coverage of CTL specifications: • Automata-theoretic approach to CTL model-checking [KVW94] represents a structure with the formula as an AND-OR graph, which looks like a Boolean circuit. • Model-checking is equivalent to shrinkage of the graph with respect to the values of the leaves. • Mutations differ from each other by the values of the leaves. • Assignment to half of the leaves shrinks the circuit in average by the factor of 2. • The complexity is O(n log n) on the average.
Observable signal isp T Values of p are variables z T Shrink the circuit F x y F Assign half of the variables error! Improving Average ComplexityExample Structure K q T F F pq p T T
Improving Average Complexity Applications [CK02] • Coverage in simulation: • Enumerative algorithm of [HHK95] starts with the maximal relation (with respect to the labeling function) and reduces it in each step. • The complexity of simulation is O(n m ), where n is the size of the state space and m is the size of the transition relation. • In the same way we can start with the maximal relation with respect to the incomplete labeling function. • We never perform the same work twice! • The average complexity of “simulation by steps” is • O(n m log n).
2n Early quantification and variable interleaving 3n Symbolic Algorithms for Coverage • CTL specifications [CKV01]: • Compute the set of pairs of states <w,v> such that w satisfies the specification in the mutant where the value of the observable signal is flipped in v. 4n OBDD variables • Simulation [CK02]: • Compute the set of triples <w,v,w’> such that w’ simulates w in the mutant where the value of the observable signal is flipped in v. 6n OBDD variables
existence of fair path reachability characterization of these states • Reducing coverage to model checking for LTL: • Checking coverage of an LTL formula is equivalent to global model-checking of the indicator formula, which is in . -calculus and might be exponential in the size of the original formula. The product automaton fair path flipping q LTL [CKKV01] • Node Coverage in FormalCheck: • Can be done by introducing a new variable that non-deterministically sets the step where we check the mutant instead of the original structure.
MODEL counterexample p p p Model Checker specification Coverage information Verification is complete! low coverage high coverage Re-check with the new specification/ model Write a better specification or change the model Recommended Workflowwith Coverage Check Fix the model/specification NO YES
There are no requests!!! • Our contribution [CK02]: • Improving average complexity for vacuity detection • Algorithm with complexity = complexity of model checking for LTL ACTL Other directions of research:Vacuity [Chockler,Kupferman] Specification: every request is eventually granted satisfies the specification! System S: Where is the problem? The specification is satisfied in S vacuously Best known complexity = complexity of model checking X size of the specification Previous work: [BBER], [KV]
System A System B … q q q q q Each successor is 1/2-responsible 100 successors Each successor is 1/100-responsible Other directions of research:Responsibility [Chockler,Halpern,Kupferman] Motivating example – Coverage of existential properties In both systems all successors are uncovered Specification: “There exists a successor labeled with q”
-far from having the property Our contribution [Chockler,Kupferman ‘02]: property testing algorithm for -regular languages and lasso-shaped input words. Other directions of research:Property Testing The idea [Goldreich,Goldwasser,Ron ‘98]: distinguish between good and very bad instances with high probability by sampling a constant number of bits from the input. having the given property Might be useful for checking the outputs of random simulator (Intel). Has a constant complexity! Previous work [Alon,Krivelevich,Newman,Szegedy ‘99]: property testing algorithm for regular languages.
MODEL p p p Model Checker specification property testing The complexity is constant! Property testing insteadof model checking? Fix the model/specification counterexample NO There is surely a bug YES Does not always mean that the system is correct!
= falsification! MODEL p p p specification property testing Continue with model checking ... . instead of model checking? Property testing . Fix the model/specification counterexample NO YES Usually the systems contain many bugs
-calculus properties are not testable. Work in progress:Checking branchingtemporal properties on trees[Chockler,Kupferman,Shpilka] Purely existential properties are trivially testable, since they have no “bad” trees. It is enough to change a constant number of paths in a tree to make it satisfy an existential property Universal properties are testable with a constant number of queries.
Summary • Positive answer of model checker does not mean that the system is correct. • The specification can cover only part of the system. • We described efficient algorithms for coverage computation for CTL, LTL, and simulation. • We presented verification methodology that contains property testing algorithms before (instead of) model checking and vacuity and coverage check after model checking.
Future Work • Coverage algorithms for different types of modifications: code coverage, circuit structure coverage, branch coverage, FSM coverage … • Coverage algorithms for other temporal logics. • Coverage algorithms for SAT solvers. • Implementation of coverage algorithms. • Useful presentation of coverage information.