Download
1 / 17
170 likes | 417 Vues
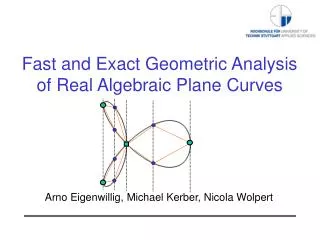
ALGEBRAIC CURVES AND CONTROL THEORY. by. Bill Wolovich. Brown University Providence, RI.

E N D
ALGEBRAIC CURVES AND CONTROL THEORY by Bill Wolovich Brown University Providence, RI Based on Chapter 3 of the book INVARIANTS FOR PATTERN RECOGNITION ANDCLASSIFICATION, World Scientific Publishing, 2000, titled “A New Representation for Quartic Curves and Complete Sets of Geometric Invariants’’ by M. Unel and W. A. Wolovich.
The unit circle curve can be defined either explicitly by the parametic equations: x(t) = sin t and y(t) = cos t, or implicitly by the polynomial, or algebraic equation:
Defines a General Algebraic or Implicit Polynomial (IP) Curve of degree n. The curve is monic if Defines a Quartic (4th Degree) Algebraic Curve
Theorem 1: Any closed, bounded algebraic curve of (even) degree n can be uniquely represented as: where is a polynomial of degree n-2, and each conic factor Theorem 2: Any closed, bounded quartic curve can be uniquely represented as the product of two ellipses and a circle; i.e.
An representation of a quartic curve The centers of the ellipses and the circle are useful related points that map to one another under Euclidean and affine transformations.
If the centers of the 2 ellipses and the circle are defined by , the (unique) Euclidean transformation matrix E which maps is given by:
The centers of the ellipses and the circle also can be used to define a canonical transformation which maps a quartic curve to a canonical (quartic) curve, namely:
A complete set of Euclidean invariants for a representation. The ratios and the distances are useful invariants for object recognition, as we now show.
Red Quartic IP Fits to Blue (a) Airplane, (b) Butterfly, (c)Guitar, (d) Tree, (e) Mig 29, and (f) Hiking Boot
For Quartic Curves: CURRENT WORK Motion of Planar Algebraic Curves Using Theorem 3: Any non-degenerate algebraic curve can be uniquely expressed as a sum of line products.
Now suppose the curve undergoes an unknown rigidmotion defined by: with skew-symmetric; i.e.
The motion of the homogenized line coefficients is defined by which implies that the line parameters of the original curve satisfy the coupled Riccati equations: