Download
1 / 15
150 likes | 175 Vues
Learn how to add contact forces and a STEP function to delay a forklift's movements in MSC ADAMS 2005 r2. Import a model, create joints, motions, and contacts following detailed instructions. Verify and run a simulation to check correctness.

E N D
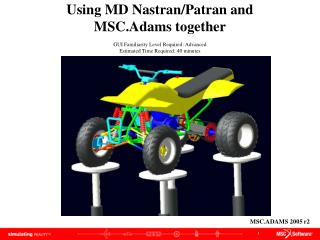
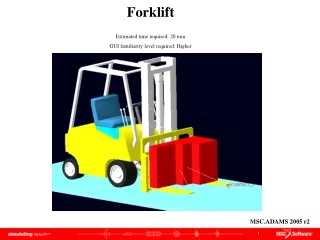
Forklift Estimated time required: 20 min GUI familiarity level required: Higher MSC.ADAMS 2005 r2
Topics Covered In this tutorial, you will learn how to: • Create a STEP function • Create contact You will need to download the file “FORKLIFT_model_start.zip“ to begin this tutorial If you have any difficulties, import the “FORKLIFT_shortcut.cmd” file and proceed from pg 10 If you have any difficulties, import the “FORKLIFT_complete.cmd” file and proceed from pg 13
Forklift Problem Add contact forces and STEP function to delay movements of a forklift.
What You Should Accomplish If you are successful, you should end up with a ADAMS model that illustrates contact forces and STEP function of a forklift.
Import Model • Download file FORKLIFT_model_start.zip • Unzip the files to C:\ • Start ADAMS • Click Import a file radio button • Select C:\ as Start in text field • Click OK d e f • File Import window will open • Right-click File To Read text field, select Browse • Locate saved file FORKLIFT_start.cmd • Click Open • Click OK h g i j
Add Translation Joint • Select Translation Joint from Joint tool stack • Click ground PAR2 PAR2.MAR1 move cursor to the right, click MAR1.Z • Select Translation Joint • Click PAR2 PAR3 PAR2.lift2_22.V229 move cursor up, click lift2_22.V6 a d b
Add Translation Joint Motion • Select Translational joint motion from Motion Driver tool stack • Click JOINT_1 • Select Translational joint motion • Click JOINT_2 a d b
Create STEP funtion • Right Click on JOINT_1, select Motion:MOTION_1 Modify • Click button • Enter STEP(time, 2.0, 0.0, 6.0, 150) in Define a runtime function text field • Click OK • Click OK c b a e d Note: the step function is a delayed movement function. It works like: STEP(time, time, distance, time 2, distance 2)
Create STEP function • Right Click on JOINT_2, select Motion_1 Modify • Click button • Enter STEP(time, 0.5, 0.0, 4.0, +36) + STEP5(time, 6.0, 0.0, 8.5, -36) • Click OK • Click OK
Create Contact • Select Contact from Forces tool stack • Right-click in I Solid text field, select Contact_Solid Browse • Highlight BOX_42, BOX_43, BOX_44 Click OK • Repeat for J Solid except use PAR3 EXTRUSION_45, EXTRUSION_46 • Choose Blue from Force Display pull down menu • Enter Stiffnees = (Stiff_Box_Fork) , Force Exponent = (Exp_box_fork) , Damping = (B_box_fork) , Penetration Depth = (Dmax_box_fork) • Choose Coulomb from Friction Force pull down menu • Enter Static Coefficient = 0.3, Dynamic Coefficient = 0.2, Striction Transition = 10.0, Friction Transition = 100.0 • Click OK b c d e a f g h i
Create Contact • I Solid= PAR3 BOX_42, BOX_43, BOX_44 • J Solid =ground BOX_21 • Choose Blue from Force Display pull down menu • Enter: • Stiffness =(Stiff_Box_Ground) • Force Exponent =(Exp_box_ground) • Damping =(B_box_ground) • Penetration Depth = (Dmax_box_ground) • Choose Coulomb from Friction Force pull down menu • Enter: • Static Coefficient = 0.62 • Dynamic Coefficient = 0.6 • Striction Transition = 10.0 • Friction Transition = 100.0 • Click OK a b c d e f g
Model This is what your screen should look like when your model is complete
Verify Verify the model Run a Simulation: Duration = 10, Step Size = 0.1
Topics Covered In this tutorial you learned how to: • Create a STEP function • Create contact
Best Practices • Check orientation and location of the translation joint • Check direction of translation joint motion • Check STEP function • Check Contact forces are between the right bodies • Check Contact values