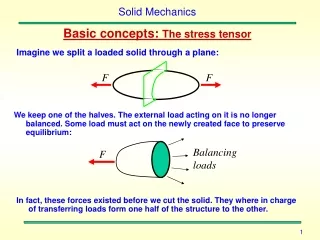
MCE 561 Computational Methods in Solid Mechanics One-Dimensional Problems
MCE 561 Computational Methods in Solid Mechanics One-Dimensional Problems. One-Dimensional Bar Element. Axial Deformation of an Elastic Bar. x. A = Cross-sectional Area E = Elastic Modulus. f(x) = Distributed Loading. Typical Bar Element. W. ( j ). ( i ). L. (Two Degrees of Freedom).

MCE 561 Computational Methods in Solid Mechanics One-Dimensional Problems
E N D
Presentation Transcript
MCE 561 Computational Methods in Solid Mechanics One-Dimensional Problems
One-Dimensional Bar Element Axial Deformation of an Elastic Bar x A = Cross-sectional AreaE = Elastic Modulus f(x) = Distributed Loading Typical Bar Element W (j) (i) L (Two Degrees of Freedom) Virtual Strain Energy = Virtual Work Done by Surface and Body Forces For One-Dimensional Case
x (local coordinate system) (2) (1) L u(x) x (2) (1) Linear Approximation Scheme y1(x) y2(x) 1 x (2) (1) yk(x) – Lagrange Interpolation Functions
Element EquationLinear Approximation Scheme, Constant Properties
x (3) (1) (2) u(x) L x (3) (1) (2) Quadratic Approximation Scheme y2(x) y3(x) y1(x) 1 x (3) (1) (2)
(2) (1) (2) (3) (1) (3) (2) (4) (1) Lagrange Interpolation FunctionsUsing Natural or Normalized Coordinates
P A1,E1,L1 A2,E2,L2 1 2 (1) (3) (2) Simple Example
P A1,E1,L1 A2,E2,L2 1 2 (1) (3) (2) Simple Example Continued
f(x) = Distributed Loading I = Section Moment of InertiaE = Elastic Modulus Typical Beam Element W (1) (2) L One-Dimensional Beam Element Deflection of an Elastic Beam x (Four Degrees of Freedom) Virtual Strain Energy = Virtual Work Done by Surface and Body Forces
Beam Approximation Functions To approximate deflection and slope at each node requires approximation of the form Evaluating deflection and slope at each node allows the determination of ci thus leading to
(2) (3) (1) 1 2 FEA Beam Problem f Uniform EI a b
(2) (3) (1) 1 2 FEA Beam Problem Solve System for Primary Unknowns U3 ,U4 ,U5 ,U6 Nodal Forces Q1and Q2Can Then Be Determined
Special Features of Beam FEA Analytical Solution GivesCubic Deflection Curve Analytical Solution GivesQuartic Deflection Curve FEA Using Hermit Cubic Interpolation Will Yield Results That Match Exactly With Cubic Analytical Solutions
Truss Element Generalization of Bar Element With Arbitrary Orientation y k=AE/L x
W (1) (2) L Frame Element Generalization of Bar and Beam Element with Arbitrary Orientation Element Equation Can Then Be Rotated to Accommodate Arbitrary Orientation