PUNTOS Y VECTORES
170 likes | 403 Vues
PUNTOS Y VECTORES. A B. VECTORES PLANOS. El módulo de un vector es la distancia entre sus extremos. La dirección de un vector es la recta que lo contiene. El sentido de un vector es el señalado desde su origen al extremo.

PUNTOS Y VECTORES
E N D
Presentation Transcript
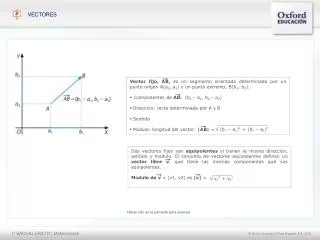
A B VECTORES PLANOS El módulo de un vector es la distancia entre sus extremos. La dirección de un vector es la recta que lo contiene. El sentido de un vector es el señalado desde su origen al extremo Un VECTOR FIJO AB. Es un segmento orientado de Origen el punto A y Extremo el punto B. Dos vectores son EQUIVALENTES, si tienen el mismo módulo, dirección y sentido. El conjunto de todos los vectores equipolentes se puede representar por un único vector u, llamado VECTOR LIBRE. El conjunto de todos los vectores del plano se representa por V2 Ver VECTORES LIBRES EN EL PLANO (figura de CABRI).
A E D B C F A E D B C SUMA GRÁFICAS DE VECTORES PLANOS O si el vector AF es EQUIVALENTE al VECTOR CD. Y E es el punto del plano, tal que los puntos A, B, F, E, son los vértices de un paralelogramo El VECTOR SUMA será el VECTOR de la diagonal AE (regla del PARALELOGRAMO). El VECTOR SUMA de los VECTOR AB y CD. Si el vector BE es EQUIVALENTE al VECTOR CD. El VECTOR SUMA será el VECTOR AE. Ver SUMA DE VECTORES (figura de CABRI).
A C B D VECTOR OPUESTO. DIFERENCIA GRÁFICA DE VECTORES El VECTOR RESTA de los VECTORES AB y CD, ES EL VECTOR suma de los VECTORES AB y – CD. El VECTOR OPUESTO al VECTOR AB es el VECTOR EQUIVALENTE al VECTOR BA. Denominado - AB Ver RESTA DE VECTORES (figura de CABRI).
E B A VECTOR AE = 5. AB PRODUCTO GRÁFICO DE UN NÚMERO POR UN VECTOR. El VECTOR PRODUCTO de un número r por el VECTOR AB es el VECTOR AE, donde E es tal que el punto B pertenece al segmento de extremos A y E, y su longitud es r veces el VECTOR AB. Ver PRODUCTO DE NÚMERO POR VECTOR (figura de CABRI).
COMBINACIÓN LINEAL DE VECTORES. Un VECTOR es COMBINACIÓN LINEAL de varios VECTORES, si se puede obtener utilizando la suma, resta o producto de un número real por un vector, con dichos vectores. Así por ejemplo el vector s , es combinación lineal de u, v y w, puesto que: 2 u + 3 v – w = s Ver COMBINACIÓN LINEAL DE VECTORES (figura de CABRI).
BASES DE LOS VECTORES DEL PLANO. COORDENADAS DE VECTORES. Dados dos vectores u y v, no paralelos ni nulos. Cualquier vector w, se puede poner como combinación lineal de los vectores u y v. Una BASE { u , v } de los vectores del plano está formada por dos vectores no paralelos, ni nulos. Si { u, v } es una BASE. Dado un vector w, si a, b son dos números reales, tales que: w = a u + b v Decimos que (a,b) son las coordenadas de w, respecto de la BASE { u, v } Ver COORDENADAS DE UN VECTOR (figura de CABRI).
OPERACIONES CON COORDENADAS DE VECTORES. Fijada una BASE ( u , v ). Supondremos ortonormales (perpendiculares de y norma 1). Entonces, si ( a , b ) y ( c , d ) son las coordenadas de los vectores p y q respectivamente, es decir: p = ( a , b ) y q = ( c , d ) Y si r es un número real entonces: p + q = ( a + c , b + d ) p - q = ( a - c , b - d ) r. p = ( r.a , r.b ) r. q = ( r.c , r.d ) VER OPERACIONES CON COORDENADAS DE VECTORES (excel)
Coordenadas del Punto P Coordenadas del Vector OP SISTEMA DE REFERENCIA DEL PLANO CARTESIANO. Fijada una BASE ( u , v ). Supondremos ortonormales (perpendiculares de y norma 1), y un punto en el plano O, al conjunto { O , u , v }, lo denominamos SISTEMA DE REFERENCIA CARTESIANO. Además, para cualquier punto P del plano, el vector r = OP, se denomina VECTOR DE POSICIÓN del punto P. Además, si P = ( a , b ) , OP = ( a , b ) Para cada punto P y cada vector r, existe un único punto Q, tal que r = PQ. A la recta que contiene el vector u, se le denomina EJE DE ABCISAS, y a la que contiene al vector v, EJE DE ORDENADAS. Si P = ( a , b ) y Q = ( c , d ). Se cumplirá: PQ = OQ – OP = ( c , d ) – ( a , b ) = = ( c – a , d – b ) VER VECTOR DE POSICIÓN DE UN PUNTO (figura de CABRI)
DISTANCIA ENTRE DOS PUNTOS. MÓDULO DE UN VECTOR. Dados dos puntos del Plano P y Q, se denota por distancia entre los puntos P y Q a la función: d ( P , Q). La norma de un vector u, se denota por | u |. Además, se cumple la siguiente igualdad: d ( P , Q). = | PQ | VER DISTANCIA ENTRE PUNTOS Y NORMA DE VECTOR (figura de CABRI)
ALGUNAS APLICACIONES DE LA UTILIZACIÓN DE VECTORES PLANOS Ejemplo: El punto medio de vector de extremos (1,2) y (3,2) es el punto de coordenadas (2,2) Tres puntos A = ( a , b ), C = ( c , d ) y E = ( e , f ), están alineados si existe un número real r, tal que AC = r AE, lo que equivale a que ( c – a ) ( d – b ) --------- = ----------- ( e – a ) ( f – a ) Dado un segmento de extremos A = ( a , b ) y C = ( c, d ), si E es el punto medio, como se cumplirá. 2 AE = AB. Identificando coordenadas se obtiene: E = ( ½ ( a + c ) , ½ ( b + d ) Ejemplo: Los puntos (3,1), (2,2) y (-1,0) no están alineados, pues: (2-3) / (-1-3) es distinto de (2-1) / (0-1)
Mas ayuda del tema de la página Matemática de DESCARTES del Ministerio de Educación y ciencia(http://recursostic.educacion.es/descartes/web/)En la siguiente diapósitiva
Mas ayuda del tema de la página lasmatemáticas.es Videos del profesorDr. Juan Medina Molina(http://www.dmae.upct.es/~juan/matematicas.htm)En la siguiente diapósitiva