Download
1 / 1
10 likes | 155 Vues
Large-Scale Matrix Factorization With Missing Data Under Additional Constraints. Kaushik Mitra † , Sameer Sheorey* † and Rama Chellappa Center for Automation Research, University of Maryland, College Park, MD, 20742 *Toyota Technological Institute, Chicago

E N D
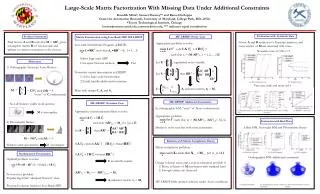
Large-Scale Matrix Factorization With Missing Data Under Additional Constraints Kaushik Mitra†, Sameer Sheorey*† and Rama Chellappa Center for Automation Research, University of Maryland, College Park, MD, 20742 *Toyota Technological Institute, Chicago kmitra@umiacs.umd.edu, ssameer@ttic.edu, “†” indicates equal contribution M = NST, rank(M) = 3 Evaluation with Synthetic Data Matrix Factorization using Low-Rank SDP: MF-LRSDP Problem Statement MF-LRSDP: Noisy Case Find factors A and B such that M = ABT, given incomplete matrix M of known rank and subject to certain constraints on the factors. Given: A and B random n×r Gaussian matrices, and some entries of M are observed with noise. Appropriate problem to solve: such that el = (M-ABT)l, l = 1,2,…,|Ω| Let E = , augmented noise variable Let R = then RRT = C= , Al indicator matrix, bl = Ml Low-rank Semidefinite Program (LRSDP): Solves large-scale SDP Uses quasi-Newton method Fast Formulate matrix factorization as LRSDP: 1) Solve large-scale factorization 2) Easily handle additional constraints Main task: design C, Al and bl Noiseless case: n=500, r=5 0 0 E Motivation AAT ABT BATBBT 0 0 EET 1) Orthographic Structure from Motion: Not all features visible in all cameras 2) Photometric Stereo: Shadows and specularities M incomplete λIm+n 0 0 I|Ω|+1 Vary size, rank and noise std σ MF-LRSDP: Additional Constraints MF-LRSDP: Noiseless Case In orthographic SfM, “rows” of A are orthonormal. Appropriate problem: such that el = (M-ABT)l , (AAT)j,k= δ(j, k) Similar to noisy case but with extra constraints xij yij M = Appropriate factorization problem to solve: such that (ABT)i,j = Mi,j for (i,j) Ω Let R = then RRT = C an identity matrix (ABT)ij = Mij => (RRT)i,j+m = Mij Al indicator matrix, bl = Mij = CST, rank (M) = 4 “rows” of Corthonormal M is incomplete Evaluation with Real Data Affine SfM, Non-rigid SfM and Photometric Stereo AAT ABT BATBBT A B A B e 1 Relation with Matrix Completion Theory Matrix completion problem: Unique solution exists and a convex relaxation possible if 1) Rows, columns of M incoherent with standard basis 2) Enough entries are observed MF-LRSDP finds optimal solution under these conditions. Mathematical Formulation Orthographic SfM: additional constraints Optimal problem to solve: Non-convex problem Popular algorithm “damped Newton” slow Proposed solution based on Low-Rank SDP