CSG and Raytracing
CSG and Raytracing. CPSC 407. What is CSG?. Computational Solid Geometry Volume Representation Very powerful modeling paradigm Difficult to render CSG models. Volumes, Not Surfaces. CSG modeling tools allow a user to apply Boolean operations to volumes Union, Intersection, Difference

CSG and Raytracing
E N D
Presentation Transcript
CSG and Raytracing CPSC 407
What is CSG? • Computational Solid Geometry • Volume Representation • Very powerful modeling paradigm • Difficult to render CSG models
Volumes, Not Surfaces • CSG modeling tools allow a user to apply Boolean operations to volumes • Union, Intersection, Difference • Only works with volumes • Closed surfaces can be interpreted as volumes… • In 3D, a volume is bounded by a surface • In 2D, the boundary is a curve
Volumes are Half-Spaces • We can think of volumes as half-spaces • Each primitive divides space into a set of points inside the volume, and a set of points outside • The sets of points are infinitely dense • Now our Boolean operations are set operations on these sets of points
Simple 3D Half-Spaces • Sphere • Cylinder • Cone • Torus • Box • Plane • Plane is tricky - it splits space into two infinite half-spaces • Note that the cylinder and cone are capped. This is not necessary • In fact, you can use an infinite cylinder and two planes to make a capped cylinder • Infinite cylinders are easier to implement • You can also get a box from 6 planes…
Boolean CSG Operations • Union • Addition, A Ú B • Intersection • A Ù B • Difference • Subtraction, A – B, A Ùnot B • Difference is not commutative
A more complicated example • Difference of: • Intersection of Sphere and Cube • Union of 3 Cylinders - =
Raytracing CSG Objects • Need a data structure to describe primitives and operations • Binary CSG • Binary tree • Leaf nodes are primitives • Interior nodes are Boolean operations
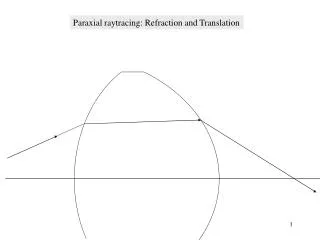
Ray Intervals • Define a ray as a set of points (r+td) • r is eye point • d is the direction of the ray • t is the scalar distance along the ray • For now, assume that a primitive is convex • A ray (r+td) intersects a convex primitive at most 2 times • Let’s say the ray enters the primitive at distance t1 and leaves at distance t2 • Now we can define an interval [t1, t2] along the ray that is inside the primitive • Note: for planes, the interval is either [a,inf] or [inf,b]
CSG Operations on Intervals • Assume we have intervals A = [a1,b1] and B = [a2,b2], and we want to combine them with a CSG operation • There are 5 cases to check for each operation: • No Overlap: • Partial Overlap: • Full Overlap:
CSG Union on 2 Intervals • Remember, Union is A or B • In the no-overlap case, we return the two intervals • The rest of the cases produce one interval, [min(a1,a2), max(b1,b2)]
CSG Intersection on 2 Intervals • Remember, Intersection is A and B • In the no-overlap case, we return no intervals • The rest of the cases produce one interval, [max(a1,a2), min(b1,b2)]
CSG Difference on 2 Intervals • Remember, Difference is A and not B • The order is important! • Here we have 5 cases: Return { [a1,b1] } Return { [0,0] } Return { [a1,a2], [b2,b1] } Return { [a1,a2] } Return { [b2,b1] }
Lists of intervals • Complex volumes are not convex • A ray may intersect the volume more than once • Instead of a single interval, we get a set of them • We want to combine interval sets S1and S2 with a Boolean CSG operation • Brute force algorithm: • For each interval Ai in S1, apply the appropriate 2-interval operation with each interval Bj from S2 • Return the list of new intervals • This algorithm is O(N2). O(NlogN) algorithms do exist • I’m not certain the list of new intervals will be unique. You may have to check if any overlap, and combine them.
Binary CSG Tree Traversal • Depth-first traversal of the tree • At each primitive node, pass back the list of intervals along the ray that intersect the primitive • At each Boolean node, combine the two child lists and pass back the new set of intervals • The intersection point is at (r+td), where t is the lower value of the first interval in the list returned from the root node of the tree
Materials and Normals for CSG • Need to determine normal at intersection point • Need tertiary information with intervals • Either object pointers or normals themselves • Note that normals are reversed for subtracted objects • Correct material properties at intersection point are debatable… • Some people take material properties at intersection point • Others prefer to define material properties for the entire CSG object as a whole
Additional CSG Bits • It is possible to partially implement CSG without doing a full CSG tree • This is how I did difference objects in my raytracer • Blob’s notes have a different CSG algorithm • His algorithm looks like it might be more efficient, but it requires a point inside/outside test • Very difficult for arbitrary triangle meshes
Common bugs • Wrong direction for eye rays • Make sure they are going into the scene • Taking the wrong intersection point • Ray intersects with a sphere twice, make sure you use the closer intersection! • Incorrect direction for reflected rays • Sending the reflected ray into the object • Total Internal Reflection in refraction • Get a sqrt(< 0) in the formula for refracted ray direction • In this case, ray reflects instead of refracting
Numerical Error • Self-Intersection due to Numerical Error • Produces ‘surface dirt’ – black speckles on otherwise smooth objects • Throw away intersections close to intersection point • Bad if you have very thin objects • Throw away any other intersections with current object • Assumes objects are convex!!! (not so for CSG, torus) • Avoid by moving a small distance along the normal at the intersection point before casting secondary rays • Bad for thin objects again, but probably the simplest method
Transforming Normals • I’m assuming you are implementing object transformations as described in Blob’s Notes • He explains how to transform the intersection point from object space to world space • He doesn’t explain how to transform normals • Tutorial on my website: • http://www.unknownroad.com/rtfm/graphics/rt_normals.html
Shadow Cache • Assumption: the last object that was hit by a shadow feeler is likely to be the one hit the next time • So test it first • For shadow feelers, it doesn’t matter if it’s the closest object (not so for reflection!) • Shadow feelers are usually a large part of the cost of rendering a scene, so this is a big speedup that is relatively simple to implement
WWW Material • http://fuzzyphoton.tripod.com/index.htm • http://www.scs.leeds.ac.uk/cuddles/hyperbks/Raytracer/contents.htm • http://www.scs.leeds.ac.uk/cuddles/hyperbks/Rendering/introduction.html • http://www.cs.wisc.edu/~schenney/courses/cs559-s2001/lectures/lecture-26-online.ppt