
Topological Examples for Algorithmic Verification
E N D
Presentation Transcript
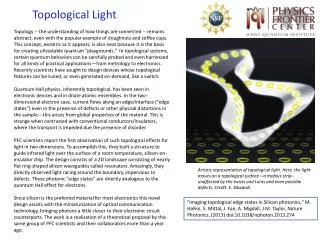
Topological Examples for Algorithmic Verification T. J. Peters, University of Connecticut www.cse.uconn.edu/~tpeters K. Abe, A. C. Russell, J. Bisceglio, E.. Moore, D. R. Ferguson, T. Sakkalis
Outline: Topology & Approximation • Algorithms • Applications
Bad Approximation Why? Separation? Curvature?
Why Bad? Homeomorphic! Changes Knot Type Now has 4 Crossings
Good Approximation Homeomorphic vs. Ambient Isotopic (with compact support) Via Curvature (local) Separation (global)
Summary – Key Ideas • Curves • Don’t be deceived by images (3D !) • Crossings versus self-intersections • Local and global arguments • Knot equivalence via isotopy
Initial Assumptionson a 2-manifold, M • Without boundary • 2nd derivatives are continuous (curvature)
Theorem: Any approximation of F in T such that each normal hits one point of W is ambient isotopic to F. Proof: Similar to flow on normal field. Comment: Points need not be on surface. (noise!)
Tubular Neighborhoods and Ambient Isotopy • Its radius defined by ½ minimum • all radii of curvature on 2-manifold • global separation distance. • Estimates, but more stable than medial axis.
Medial Axis • H. Blum, biology, classification by skeleton • Closure of the set of points that have at least 2 nearest neighbors on M
Large Data Set ! Partitioned Stanford Bunny
Acknowledgements, NSF • I-TANGO: Intersections --- Topology, Accuracy and Numerics for Geometric Objects (in Computer Aided Design), May 1, 2002, #DMS-0138098. • SGER: Computational Topology for Surface Reconstruction, NSF, October 1, 2002, #CCR - 0226504. • Computational Topology for Surface Approximation, September 15, 2004, #FMM -0429477.