Download
1 / 42
530 likes | 1.11k Vues
PM motori. Koračni motori. ELEMENTI AUTOMATIZACIJE POSTROJENJA. Sinkroni strojevi Sinkroni motori Asinkroni strojevi Asinkroni motori. Prethodno predavanje. PM motori Elektronički komutirani motori (DC motori bez četkica) Sinkroni motori s permanentnim magnetima na rotoru

E N D
PM motori. Koračni motori. ELEMENTI AUTOMATIZACIJE POSTROJENJA
Sinkroni strojevi • Sinkroni motori • Asinkroni strojevi • Asinkroni motori Predavanje 8 - EAP Prethodno predavanje
PM motori • Elektronički komutirani motori (DC motori bez četkica) • Sinkroni motori s permanentnim magnetima na rotoru • Koračni motori • Permanentnomagnetski • Reluktantni • Hibridni Predavanje 8 - EAP SADRŽAJ
Posljednjih dvadesetak godina naglo se povećava primjena električnih motora s permanentnim magnetima na rotoru • Razlog tome je pronalazak permanentnih magneta s visokom koncentracijom magnetske energije po jedinici volumena (tzv. Magneti na bazi rijetkih zemalja), te ubrzan razvoj mikroprocesorski upravljanih pretvarača energetske elektronike. • Očekuje se da će u bliskoj budućnosti zamjeniti istosmjerne i asinkrone motore u velikom broju aplikacija, naročito u servopogonima (snaga do 10 kW). • Osnovna područja primjene očekuju se u: robotici, alatnim strojevima, uređaji za pozicioniranje, fleksibilne linije, itd. Predavanje 8 - EAP MOTORI S PERMANENTNIM MAGNETIMA NA ROTORU
U odnosu na istosmjerne motore osnovna prednost ovih motora je nepostojanje četkica i kolektora. • U odnosu na pogone s asinkronim motorima prednosti pogona s PM motorima su: 1) Veća korisnost zbog zanemarivih rotorskih gubitaka (na rotoru PM motora nema gubitaka u namotajima kao kod asinkronih motora). 2) Manji moment inercije, pa se uz isti razvijeni moment dobiva brži odziv brzine vrtnje tj. postiže se bolja dinamika što je posebno važno kod servo pogona. 3) Manji volumen i težina kod iste snage. 4) Budući da magnetsko polje stvaraju permanentni magneti nije potrebna jalova snaga iz mreže pa je cosθ≈1 (veća korisnost). Predavanje 8 - EAP MOTORI S PERMANENTNIM MAGNETIMA NA ROTORU
5) Sustav upravljanja PM motorima znatno je jednostavniji u odnosu na vektorski upravljane asinkrone motore. 6) Zbog postojanja konstantne uzbude permanentnih magneta postižu se bolje karakteristike kočenja. • Nedostatci PM motora u odnosu na asinkrone motore: 1) Zbog prisustva relativno skupih kvalitetnih magneta i složenosti njihove ugradnje 4-6 puta skuplji od asinkronih motora. 2) Mogućnost razmagnetiziranja magneta kod PM motora pri visokim strujama. 3) Budući da pri povišenim temperaturama opada jakost permanentnih magneta (ovisi o vrsti magneta), kod PM motora je jače izražen utjecaj promjene temperature na karakteristike pogona. Predavanje 8 - EAP MOTORI S PERMANENTNIM MAGNETIMA NA ROTORU
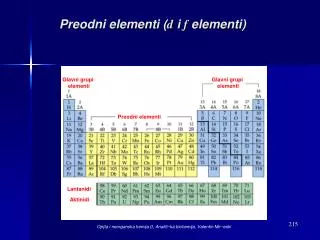
Projektiranje magnetskog kruga s permanentnim magnetima vrši se tako da prostorni raspored indukcije u zračnom rasporu omogući optimalno magnetsko iskorištenje stroja, te da magneti budu što manje izloženi utjecaju reakcije armature i mogućnosti razmagnetiziranja. • Svojstva magneta određena su koercitivnim poljem Hc i remanentnom indukcijom Br. Predavanje 8 - EAP Permanentni magneti za PM motore B-H karakteristike za nekoliko permanentnih magneta (Nd – neodimij, B – bor, Sm – samarij, Co – kobalt, Fe – željezo)
Feriti napravljeni iz smjese nemagnetskih oksida željeza i barija imaju jako nisku remanentnu indukciju (0.3-0.4 T) što je znatno niže od željene indukcije u zračnom rasporu. • Magneti su poprečno magnetizirani, a povećanje koncentracije toka u zračnom rasporu i prihvatljive vrijednosti indukcije moguće je postići povećanjem poprečne površine magneta u odnosu na površinu kroz koju magnetski tok izlazi iz rotora u zračni raspor. • Osnovna prednost ferita je niska cijena u odnosu na ostale kvalitetnije magnetske materijale. • Njihova radna temperatura je do približno 100°C. Predavanje 8 - EAP Permanentni magneti za PM motore
Magnetski materijali iz elemenata rijetkih zemalja imaju visoku remanentnu indukciju i visoko koercitivno polje, te je stoga visoku magnetsku indukciju u zračnom rasporu moguće postići s magnetima malih dimenzija. • Samarium-Cobalt magneti imaju remanentnu indukciju od 0.8-1.1 T, te relativno visoko koercitivno polje. • Specifični otpor je 50 puta veći od bakra, pa su stoga zanemarivi gubici u magnetima uslijed promjene toka u njima, tj. zanemaruju se vrtložne struje u njima. • Njihova cijena je visoka radi visoke cijene Samariuma (element iz skupine rijetkih zemalja) i Cobalta koji je metal. Predavanje 8 - EAP Permanentni magneti za PM motore
Magnetski materijali iz elemenata rijetkih zemalja • Pojavom magneta napravljenih sintetiziranjem neodiuma, željeza i bora (NdFeB) 1983. godine naglo se povećala primjena permanentnih magneta u motorima. • Pri sobnoj temperaturi remanentna indukcija je između 1.1-1.25 T. • To omogućava da se u relativno velikom zračnom rasporu, npr. 1 mm, s magnetima debljine 3-4 mm realizira magnetska indukcija od 0.8-0.9 T. • Maksimalna radna temperatura ovih magneta neta je od 100-140°C, a radni otpor je 85 puta veći od otpora bakra. Predavanje 8 - EAP Permanentni magneti za PM motore
(engl. Brushless dc motor) • Ograničenja motora s četkicama: • Električna veza između rotora i izvora istosmjerne struje se ostvaruje tako da se izvor istosmjerne struje spoji na grafitne četkice koje kližu po komutatoru. • Prilikom prelaska četkice s jedne na drugu lamelu komutatora postoji trenutak kada se izvor nalazi u kratkom spoju uslijed čega dolazi do iskrenja četkica. • Iskrenje četkica dovodi do polaganog uništavanja grafitnih četkica, alii do oksidacije i trošenja komutatora, pa je to glavni nedostatak ove vrste motora Predavanje 8 - EAP Elektronički komutirani motor
(engl. Brushless dc motor) • Ograničenja motora s četkicama: • Iskrenje se pojačava ukoliko se povećava: brzina vrtnje motora (pri velikim brzinama teško održavati kontakt četkica s komutatorom), napon, opterećenje, odnosno struja kao posljedica povećanja napona ili opterećenja. • Iskrenje osim samog uništavanja komutatora i četkica za posljedicu ima i stvaranje čujnog i električkog šuma. • Kod velikih strojeva komutator je skup i zahtijeva preciznu ugradnju mnogih dijelova. Predavanje 8 - EAP Elektronički komutirani motor
(engl. Brushless dc motor) • Karakteristike EKM (DC motor bez četkica): • Na rotoru su smješteni permanentni magneti, a stator se sastoji od namota. • predstavlja oblik AC motora s električkom komutacijom. • Motori ne sadrže četkice ili komutator • mnogo efikasniji, manje trenje. • mogu se pogoniti većim brzinama bez rizika oštećenja četkica, što nije slučaj sa DC motorom s četkicama. • Kroz statorske namote se propušta struja koja dovodi do zakretanja rotora • Strujom koja prolazi kroz statorske namote se upravlja izvana elektroničkom sklopom, tzv. elektroničkim komutatorom, koji zamjenjuje klasični komutator. Predavanje 8 - EAP Elektronički komutirani motor
(engl. Brushless dc motor) • Uloga komutatora: promjena polariteta u vodičima ovisno o njihovom položaju u odnosu na uzbudno polje. • Presjek DC motora bez četkica. Predavanje 8 - EAP Elektronički komutirani motor
(engl. Brushless dc motor) • Mehanički raspored dijelova motora Predavanje 8 - EAP Elektronički komutirani motor
Da bi se moglo ispravno odrediti kroz koji namot će elektronički komutator poslati struju, i struju kojeg smjera, takav motor mora imati senzor položaja rotora na osnovu čega se upravlja radom samog komutatora (zahtijeva sedodatna elektronika i senzori položaja). • Ovaj senzor koristi Hall-ov efekt. (Ukoliko se poluvodič nalazi u električnom polju, ono će uzrokovati protok električne struje gustine J. Ako okomito na smjer tog polja djeluje magnetsko polje indukcije B, javlja se, transverzalno na oba polja, novo električno polje jačine: E = RH J B gdje je RH Hallova konstanta.) • Brz odziv brzine vrtnje. • Učinkovitost istosmjernog motora bez četkica je 85-90%, dok je istosmjernog motora s četkicama 75-80%. • Dodatni energetski prekidači u pojačalu zahtijevaju znatne dodatne troškove. • Koriste se u aplikacijama gdje se zahtijevaju velika područja brzina. Predavanje 8 - EAP Elektronički komutirani motor
Usporedba Predavanje 8 - EAP Elektronički komutirani motor
(engl. Brushless dc motor) • Osnovna struktura elektronički komutiranog motora (EKM) prikazana je na slici Predavanje 8 - EAP Elektronički komutirani motor • Na statoru se nalazi trofazni simetrični namotaj (slično kao kod asinkronog motora) uglavnom spojen u zvijezdu, a na rotoru su postavljeni permanentni magneti. • Konfiguracija magneta prema slici zahtjeva najkvalitetnije magnetske materijale (SmCo, NdFeB) da bi se ostvarila zadovoljavajuća magnetska indukcija u zračnom rasporu.
(engl. Brushless dc motor) • Ekvivalentni zračni raspor u sebi uključuje stvarni zračni raspor uvećan za debljinu permanentnih magneta budući da permanentni magneti imaju permeabilnost približno jednaku zraku (μr =1). • Raspodjela namota na statoru, te izvedba i položaj magneta na rotoru osiguravaju da se pri konstantnoj brzini vrtnje u namotu statora induciraju fazne elektromotorne sile trapeznog valnog oblika s trajanjem ravnog dijela trapeza od 120° električnih. Predavanje 8 - EAP Elektronički komutirani motor
(engl. Brushless dc motor) • Idealni valni oblici EMS-a i faznih struja pomoću kojih se ostvaruje konstantan moment motora (slika). Predavanje 8 - EAP Elektronički komutirani motor
(engl. Brushless dc motor) • Elektromagnetski moment EKM-a može se izraziti pomoću snage u zračnom rasporu i kutne brzine rotora: gdje su ea, eb, ec fazne EMS inducirane poljem permanentnih magneta, ia, ib, ic fazne struje, a ωkutna brzina rotora. Predavanje 8 - EAP Elektronički komutirani motor
(engl. Brushless dc motor) • Da bi stroj razvijao konstantan moment u zračnom rasporu struje moraju imati oblik pravokutnih impulsa koji se po širini, fazi i predznaku poklapaju s intervalom u kojem je EMS te faze konstantna. • Postoji šest intervala u električnom periodu za koje je karakteristično da struja teče kroz dvije faze, a u trećoj je jednaka nuli (slika). • U svakoj šestini periode stroj se praktički ponaša kao istosmjerni motor, s tim da se uzbuda nalazi na rotoru a armatura na statoru. • Svaku šestinu periode vrši se komutacija struje s faze na fazu, a budući da se ta komutacija ne vrši pomoću kolektora i četkica kao kod istosmjernih motora, već pomoću elektroničkog pretvarača ovaj se motor i naziva elektronički komutirani motor. Predavanje 8 - EAP Elektronički komutirani motor
Shema napajanja Predavanje 8 - EAP Elektronički komutirani motor
Blok shema upravljačkog kruga Predavanje 8 - EAP Elektronički komutirani motor
Oblici faznih struja u ovisnosti od položaja rotora (uzbudnog toka). Predavanje 8 - EAP Elektronički komutirani motor
Osnovna struktura SMPM-a je prikazana na slici gdje se vidi da je konfiguracija slična EKM-u s razlikom da je prekrivanje oboda rotora s permanentnom magnetima nešto manje. • Na taj se način, u kombinaciji s izvedbom namota statora, postiže da su inducirane elektromotorne sile sinusnog valnog oblika, a ne trapeznog kao kod EKM-a. Predavanje 8 - EAP Sinkroni motor s permanentnim magnetima na rotoru (SMPM)
Za razliku od EKM-a kod ovih motora struje teku cijelo vrijeme kroz sve tri faze, te je potrebno kontinuirano mjerenje položaja rotora da bi se cijelo vrijeme držao željeni položaj rezultirajućeg vektora struja u odnosu na permanentne magnete. • S tog stanovišta je i kompliciraniji zakon upravljanja ovim motorima u odnosu na EKM, ali s druge strane SMPM ima kvalitetnije statičke i dinamičke karakteritike u odnosu na EKM. • Naziv sinkroni motor s permanentnim magnetima je proizišao iz činjenice što je ovaj motor praktički jednak sinkronom motoru pri čemu su umjesto uzbudnog namotaja postavljeni permanentni magneti. • Osim toga ovaj motor nema prigušni namotaj, te je stoga nemoguć njegov rad bez elektroničkog upravljanja koje se temelji na kontinuiranom mjerenju položaja rotora. Predavanje 8 - EAP Sinkroni motor s permanentnim magnetima na rotoru (SMPM)
Motivacija: proizvesti motor koji bi se mogao neposredno upravljati pomoću digitalnog računala i čiji bi se izlazni signal neposredno dovodio računalu bez složenih A/D i D/A pretvornika. • Od takvih motora se zahtijevaju diskretni, odnosno koračni mehanički pomaci, odakle i potječe naziv koračni motori (eng. stepper motors). • Koračni motori su elektromehanički pretvornici energije, koji pulsnu, odnosno koračnu električku pobudu pretvaraju u koračni mehanički pomak. • Izrađuju se u rotacijskoj i translacijskoj izvedbi (preovladava rotacijska). • Na malim koračnim brzinama rotor se zaustavlja na svakom koračnom položaju. Predavanje 8 - EAP koračni motorI
Na srednjim brzinama nema zaustavljanja rotora na svakom koračnom položaju, ali kutna brzina oscilira ovisno o položaju. • Što se koračna brzina više povećava, oscilacije kutne brzine postaju sve manje, tako da na velikim koračnim brzinama kutna brzina teži konstantnoj brzini. • Koračni motor je električki motor bez komutatora. • Svi namoti su smješteni na statoru, a rotor je permanentni magnet, ili, u slučaju tzv. varijabilnoreluktancijskog motora, predstavlja blok zupčanika od mekog magnetskog materijala. • Komunikacijom se upravlja izvana sa kontrolerom, pri čemusu motori i kontroleri dizajnirani na način da motor možedoći u bilo koju fiksnu poziciju kada rotira na jedan ili drugi način. Predavanje 8 - EAP koračni motorI
Prednosti: • Niska cijena. • Male dimenzije i masa. • Velike funkcijske mogućnosti. • Često se isporučuju integrirano s radnim mehanizmom • Pretvara digitalne ulazne impulse u analogno kretanje: • uključenje napona naredne faze - pomak za 1 korak, • broj koraka = broj upravljačkih impulsa (jedan korak odgovara određenom fiksnom kutu zakreta). • Kut rotacije motora je proporcionalan ulaznom impulsu. • Odziv rotora na digitalne impulse omogućuje upravljanje u otvorenoj petlji • Ne akumulira pogrešku položaja. Predavanje 8 - EAP koračni motorI
Prednosti: • Precizno pozicioniranje i ponovljivost pokreta, budući da dobri koračni motori imaju pogrešku od 3-5% od ukupnog koraka. • Odličan odziv na zalet, zaustavljanje i promjenu smjera. • Vrlo pouzdani jer nemaju kontaktnih četkica u motoru. • Moguće je postići vrlo sporu sinkronu brzinu rotacije kada je osovina direktno opterećena (teret na osovini). • Može se realizirati široko područje raspoloživih brzina jer je brzina proporcionalna frekvenciji ulaznih impulsa. Predavanje 8 - EAP koračni motorI
Nedostatci: • Fiksan korak. • Razmjerno mala učinkovitost, veliko nadvišenje i oscilatornost u odzivu od jednog koraka. • Ograničene mogućnosti pokretanja tereta s velikim momentom inercije. • Moment trenja i aktivni teret mogu povećati pogrešku položaja (moguć je gubitak koraka – posljedica je akumulirana pogreška položaja). • Rad neprikladan i teško ih je upravljati na velikim brzinama. Predavanje 8 - EAP koračni motorI
Podjela: Podjela koračnih motora se vrši prema: • vrsti uzbude; • broju faza; • broju polova; • načinu kretanja. Prema vrste uzbude razlikujemo koračne motore prema: • Načinu stvaranja magnetskog polja (elektromagnetska ili permanentnim magnetima) • Smještaju uzbude (uzbuda na rotoru ili statoru). Predavanje 8 - EAP koračni motorI
Podjela: Prema tipu uzbude koračne motore dijelimo na: • koračne motore s permanentnim magnetima (rotor magnetiziran radijalno); • hibridne koračne motore (permanentni magneti na rotoru smješteni aksijalno) • reluktantne (reaktivne koračne motore) koji nemaju uzbudu. Broj faza je najčešće 2-6 (satovi – 1 faza). Predavanje 8 - EAP koračni motorI
Podjela: Prema broju polova dijele se na: • broj polova serijski proizvedenih koračnih motora pr=1 do 90; • koračni motor s permanentnim magnetima na rotoru, pr=1 do 4; • Po načinu kretanja – rotacijski i translacijski. Predavanje 8 - EAP koračni motorI
Permanentnomagnetski koračni motori • Imaju radijalnipermanentnomagnetski rotor i višefazno izvedeni elektromagnetski stator. • Permanentni magneti su na rotoru. • Uzastopnim ukapčanjem ili okretanjem smjera struja pojedinih statorskih faza ili njihovih kombinacija po određenom redoslijedu, rezultantno magnetsko poljestatora skokovito se okreće u jednom ili drugom smjeru. • Pri tome se permanentnomagnetski rotor postavlja u smjerurezultantnog statorskog polja i na taj način se obavljakoračna rotacija. • Broj faza: od 8-12, broj pari polova: 1-12, broj paketa statora 2-4. Predavanje 8 - EAP koračni motorI
Permanentnomagnetski koračni motori • Ova vrsta koračnih motora ima malu rezoluciju – tipični koračni kutevi između 7.5º i 15 º. • Rotor nema velike zube, ali je magnetiziran s alternativnim S i N polovima. Predavanje 8 - EAP koračni motorI
Permanentnomagnetski koračni motori – princip rada • Zatvaranjem sklopki u navedenom redoslijedu : • rotacija rezultantnog vektora magnetskog polja, • zakretanje rotora prema vektoru magnetskog polja. • Kretanje smjerom obrnutim od kazaljke na satu. Predavanje 8 - EAP koračni motorI
Reluktantni koračni motori • Imaju nazubljeni višefazni namotani stator (lameliran) i nazubljeni rotor od mekog željeza (višepolni rotor). • Kut koračanja im ovisi o broju zuba statora i rotora, o načinu namatanja statorskih faza te načinu njihove pobude. • Podjela reluktatntnih koračnih motora • Prema broju paketa namota (jednopaketni, višepaketni) • Prema načinu kretanja (rotacijski, translacijski) • Prema vrsti zračnog raspora (radijalni i aksijalni) Predavanje 8 - EAP koračni motorI
Reluktantni motor s jednopaketnim statorom • Broj zuba statora i rotora je različit. • Okretanje se postiže postavljanjem nemagnetskog željeznog rotora (meko željezo) u položaj minimalne reluktancije statorskog magnetskog polja. • Jednopaketni koračni motori se okreću uzastopnim ukapčanjem faza. Predavanje 8 - EAP koračni motorI
Reluktantni motor s jednopaketnim statorom • Npr. 1. Ua=U - zubi rotora poravnaju se sa zubima statora faze A 2. Ua = 0, Ub = U zubi rotora poravnaju se sa zubima statora faze B – korak u smjeru kazaljke na satu. ... Predavanje 8 - EAP koračni motorI
Hibridni koračni motori • Kombinacija načela na kojima se zasniva rad permanentnomagnetskih i motora s promjenljivom reluktancijom. • S nazubljenim statorom na kojem se nalaze elektromagnetski svici i nazubljenim rotorom postižu se dobra svojstva promjenljive reluktancije i permanentnoga magnetskog polja. • Zubi su najčešće istoimeni permanentni magneti ali ponekad mogu biti i bez uzbude. Predavanje 8 - EAP koračni motorI