Download
1 / 10
100 likes | 139 Vues
Research study demonstrating real-time estimation of ocean wave fields using Doppler radar measurements, Fourier transforms, and wavefield reconstruction and prediction techniques.

E N D
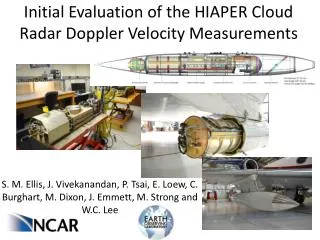
REAL-TIME ESTIMATION OF OCEAN WAVE FIELDSFROM MARINE RADAR DATADavid R. Lyzenga, Okey G. Nwogu, and Robert F. BeckUniversity of Michigan, Ann Arbor, MichiganAndrew O’Brien and Joel JohnsonThe Ohio State University, Columbus, OhioTony de Paolo and Eric TerrillScripps Institution of Oceanography, La Jolla, CaliforniaOffice of Naval Research project N00014-11-D-0370 Dr. Paul Hess, ONR Code 331, Program Manager
Doppler Measurements • Conventional (SI-TEX/Koden) marine radar modified to digitally record IF signal at 160 MSPS • Doppler shift measured using pulse-pair processing • Coherence time is increased by replacing standard local oscillator with more stable (MITEQ) source • Standard horizontally-polarized antenna was also replaced by a custom vertically-polarized antenna
Polar Fourier Transform (PFT) • Doppler data from rotating antenna is processed in native polar (range-azimuth) coordinates • After resampling onto a regular azimuthal grid, data is spatially Fourier transformed using where w(r, ) is a weighting or aperture function used to select an optimal range of viewing angles for estimating each Fourier component
Surface Elevation PFT • The surface elevation is related to the radial velocity through the dynamic free-surface boundary condition where is the velocity potential function obtained by integrating the radial velocity in the range direction • /t is computed in Fourier space by multiplying the radial velocity PFT by /kwhereis obtained from the rate of change of the PFT phase at each wavenumber
Flow Chart / Timing modified Koden radar radar preprocessor resample onto uniform angular grid compute radial velocity PFT compute frequency and average PFT convert to surface elevation PFT • Each antenna rotation produces one frame of radar data • Frames are processed in real time, producing one complete PFT every 2.5 sec
Wavefield Reconstruction • Wavefield can be reconstructed at the time of measurement by inverse transforming the surface elevation PFT • Note that different wave components are measured at different spatial locations (upwave from the radar)
Wavefield Prediction • Wavefield can also be constructed at a later time by advancing the phase of each Fourier component by t • As time progresses, wave components begin to converge at a spatial location near the radar
LIDAR Comparisons surface elevations measured by Scripps airborne lidar from 1:03:26-1:03:46 on 9/13/2013 surface elevations obtained from radar measurements collected at 1:02:28 UTC on 9/13/2013
Buoy Comparisons ship track (red) and drifting buoy positions (blue) for the period 23:10-23:25 UTC on 9/17/2013 surface elevations measured by buoy from 23:20-23:22 UTC and predicted from radar data collected at 23:18:32 UTC on 9/17/2013
Conclusions • Surface wavefields can be inferred from shipboard Doppler radar measurements over areas on the order of a few km2 • Instantaneous measurements of different wave components do not overlap spatially because each component is measured upwave from the radar • However, when the measurements are projected forward in time, these components merge to produce a nearly complete picture of the wavefield at locations near the radar