Lecture 5: On-line search Constraint Satisfaction Problems
280 likes | 400 Vues
In this recap of Rutgers CS440 from Fall 2003, we delve into online search and constraint satisfaction problems (CSPs). The lecture covers various search strategies, including blind search algorithms (BFS, DFS), informed search techniques (Greedy, A*), and local search methods (Hill-climbing, SA, GA). We explore the dynamics of online search in stochastic environments as well as the concept of CSPs, where solutions require satisfying a set of variables and constraints. Examples include map coloring and scheduling problems. Learn the techniques to enhance search efficiency and problem-solving in AI.

Lecture 5: On-line search Constraint Satisfaction Problems
E N D
Presentation Transcript
Lecture 5:On-line searchConstraint Satisfaction Problems Reading: Sec. 4.5 & Ch. 5, AIMA Rutgers CS440, Fall 2003
Recap • Blind search (BFS, DFS) • Informed search (Greedy, A*) • Local search (Hill-climbing, SA, GA1) • Today: • On-line search • Constraint satisfaction problems Rutgers CS440, Fall 2003
On-line search • So far, off-line search: • Observe environment, determine best set of actions (shortest path) that leads from start to goal • Good for static environments • On-line search: • Perform action, observe environment, perform, observe, … • Dynamic, stochastic domains: exploration • Similar to… • …local search, but to get to all successor states, agent has to explore all actions Rutgers CS440, Fall 2003
Depth-first online • Online algorithms cannot simultaneously explore distant states (i.e., jump from current state to a very distant state, like, e.g., A*) • Similar to DFS • Try unexplored actions • Once all tried, and the goal is not reached, backtrack to unbacktracked previous state Rutgers CS440, Fall 2003
DFS-Online • functionaction = DFS-Online(percept) • s = GetState(percept); • ifGoalTest(s) return stop; • ifNewState(s) unexplored[s] = Actions(s); • if NonEmpty(sp) • Result[sp,ap] = s; • Unbacktracked[s] = sp; • end • If Empty(unexpolred[s]) • If Empty(unbacktracked[s]) return stop; • else • a: Result[ s, a ] = Pop( unbacktracked[s] ); • else • a = Pop( unexplored[s] ); • end • sp = s; • returna; • endcc Rutgers CS440, Fall 2003
Maze G s0 Rutgers CS440, Fall 2003
Online local search • Hill-climbing… • Is an online search! • However, it does not have any memory. • Can one use random restarts? • Instead… • Random wandering by choosing random actions (random walk) --- eventually, visits all points • Augment HC with memory of sorts: keep track of estimates of h(s) and updated them as the search proceeds • LRTA* - learning real-time A* Rutgers CS440, Fall 2003
LRTA* • functionaction = LRTA*(percept) • s = GetState(percept); • ifGoalTest(s) return stop; • ifNewState(s) H[s] = h(s); • ifNonEmpty(sp) • Result[sp,ap] = s; • H[sp] = min b Actions(sp) { c(sp,b,s) + H(s) }; • end • a = arg min b Actions(s) { c(s,b, Result[s,b] ) + H(Result[s,b] ) }; • end • sp = s; • returna; • endcc Rutgers CS440, Fall 2003
Maze – LRTA* 2 1 G 3 2 1 1 4 3 2 2 2 3 4 3 s0 3 3 3 3 4 4 4 4 4 4 4 Rutgers CS440, Fall 2003
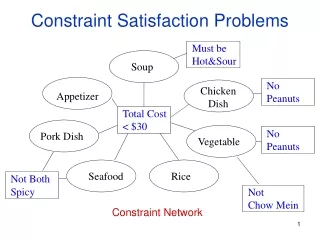
Constraint satisfaction problems - CSP • Slightly different from standard search formulation • Standard search: abstract notion of state + successor function + goal test • CSP: • State: a set of variables V = {V1, …, VN} and values that can be assigned to them specified by their domains D = {D1, …, DN}, Vi Di • Goal: a set of constraints on the values that combinations of V can take • Examples: • Map coloring, scheduling, transportation, configuration, crossword puzzle, N-queens, minesweeper, … Rutgers CS440, Fall 2003
Map coloring • Vi = { WA, NT, SA, Q, NSW, V, T } • Di = { R, G, B } • Goal / constraint: adjacent regions must have different color • Solution: { (WA,R), (NT,G), (SA,B), (Q,R), (NSW,G), (V,R), (T,G) } Rutgers CS440, Fall 2003
Constraint graph • Nodes: variables, links: constraints NT Q WA NSW SA V T Rutgers CS440, Fall 2003
Types of CSPs • Discrete-valued variables • Finite: O(dN) assignments, d = |D| • Map coloring, Boolean satisfiability • Infinite: D is infinite, e.g., strings or natural numbers • Scheduling • Linear constraints: aV1 + bV2 < V3 • Continuous-valued variables • Functional optimization • Linear programming Rutgers CS440, Fall 2003
Types of constraints • Unary: V blue • Binary: V Q • Higher order • Preferences: different values of V have different “scores” Rutgers CS440, Fall 2003
CSP as search • Generic: fits all CSP • Depth N, N = number of variables • DFS, but path irrelevant • Problem: # leaves is n!dN > dN • Luckily, we only need consider one variable per depth! – Assignment is commutative. • functionassignment = NaiveCSP(V,D,C) • 1) Initial state = {}; • 2) Successor function: assign value to unassigned variable that does not conflict with current assignments. • 3) Goal: Assignment complete? • end Rutgers CS440, Fall 2003
Backtracking search • DFS with single variable assignment Rutgers CS440, Fall 2003
NT Q WA NSW SA V T Map coloring example NT Q WA Rutgers CS440, Fall 2003
How to improve efficiency? • Address the following questions • Which variable to pick next? • What value to assign next? • Can one detect failure early? • Take advantage of problem structure? Rutgers CS440, Fall 2003
NT Q WA NSW SA V T Most constrained variable • Choose next the variable that is most constrained based on current assignment NT WA SA Rutgers CS440, Fall 2003
NT Q WA NSW SA V T Most constraining variable • Tie breaker among most constrained variables NT Q SA Rutgers CS440, Fall 2003
Least constraining value • Select the value that least constrains the other variables (rules our fewest other variables) Rutgers CS440, Fall 2003
Forward checking • Terminate search early, if necessary: • keep track of values of unassigned variables Rutgers CS440, Fall 2003
Constraint propagation • FC propagates assignment from assigned to unassigned variables, but does not provide early detection of all failures • NT & SA cannot both be blue! • CP repeatedly enforces constraints Rutgers CS440, Fall 2003
Arc consistency • Simplest form of propagation makes each arcs consistent: • X -> Y is consistent iff for all x X, there is y Y that satisfies constraints • Detects failure earlier than FC. • Either preprocessor or after each assignment • AC-3 algorithm Rutgers CS440, Fall 2003
NT Q WA NSW SA V T Problem structure • Knowing something about the problem can significantly reduce search time • T is independent of the rest! Connected components. • c-components => O(dcn/c) Rutgers CS440, Fall 2003
NSW V WA Q SA NT NT Q WA NSW SA V T Tree-structured CSP • If graph is a tree, CSP can be accomplished in O(nd2) • Flatten tree into a “chain” where each node is preceded by its parent • Propagate constraints from last to second node • Make assignment from first to last Rutgers CS440, Fall 2003
NT NT Q Q WA WA NSW NSW SA SA V V T T Nearly tree-structured problems • What if a graph is not a tree? • Maybe can be made into a tree by constraining it on a variable. • If c is cutset size, then O(dc (N-c)d2 ) Rutgers CS440, Fall 2003
Iterative CSP • Local search for CSP • Start from (invalid) initial assignment, modify it to reduce the number of violated constraints • Randomly pick a variable • Reassign a value such that constraints are least violated (min-conflict heuristic) • Hill-climbing with h(s) = min-conflict Rutgers CS440, Fall 2003