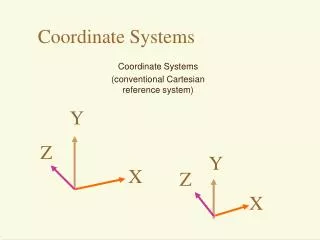
Coordinate Systems
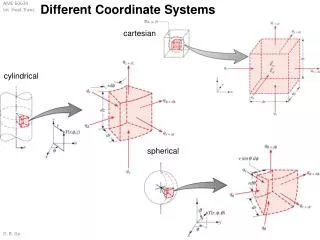
Coordinate Systems. Rectangular coordinates, RHR, area, volume Polar <-> Cartesian coordinates Unit Vectors Vector Fields Dot Product Cross Product Cylindrical Coordinates Spherical Coordinates. Rectangular coordinates. x, y, z axes Right hand rule Locating points

Coordinate Systems
E N D
Presentation Transcript
Coordinate Systems • Rectangular coordinates, RHR, area, volume • Polar <-> Cartesian coordinates • Unit Vectors • Vector Fields • Dot Product • Cross Product • Cylindrical Coordinates • Spherical Coordinates
Rectangular coordinates • x, y, z axes • Right hand rule • Locating points • Differential elements • x+dx, y+dy, z+dz • Volume dv = dxdydz • Area dS = dxdy, dydz, dzdx • Diagonal
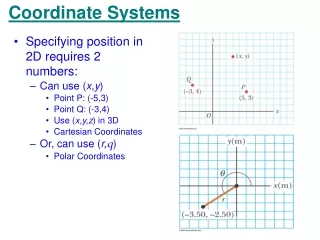
Converting Polar <-> Cartesian Coordinates • Rectangular (Ax , Ay) vs. polar (r,θ) coordinates A Ay r θ Ax
Unit vectors • Can write any vector as combination of scaled unit vectors where ax and ayare unit vectors (1 unit long) in x and y direction • Can think of vector addition/subtraction as • Which is what we’re doing with component addition! Cyay C ay ax Cxax
Finding unit vector in any direction • Write vector B • Length of B • Unit vector in direction of B • Example 1.1 • Find |G|, aG -0.333
Vector Field • A vector quantity which varies as a function of position. • Glacier flow Pipe flow Electric field in microwave cavity (blue lines)
Multiplication of vectors – “dot” product • Extracts scalar proportional to magnitude of vectors and how they are working together. • Positive for θ < 90, Negative for θ > 90, Zero for θ = 90 • Maximum when parallel (θ = 0) minimum when anti-parallel (θ = 180) • Weighted by cos(θ) for all other angles. • Examples • Work • How force and displacement work with one another • Either increases, decrease KE, or leaves KE unchanged • Flux • How electric field cuts through surface • Leaving volume (+ charge), entering volume (- charge), glancing volume (0)
Dot Product • Definition • Alternate form • z • z • Multiply out • since. • Component of B in x direction • vector
Example • Vector field at point Q(4,5,2) • Unit vector • At point Q • Dot product • Vector component in direction of • Angle between
Multiplication of vectors – “cross” product • Extracts vectorproportional to magnitude of vectors and how they are working at right angles to one another. • Maximum for θ = 90, zero for θ = 0, zero for θ = 180 • Weighted by sin(θ) for all other angles • Direction along axis perpendicular to both vectors • Specific direction determined by Right Hand Rule • Examples • Torque • How Moment Arm and Force work at right angles • Twisting action (+/-) along axis perpendicular • Magnetic Force • Deflection force perpendicular to v and B
Cross Product • Definition • Alternate form • z • z • Multiply out • since . • Alternate definition
Cylindrical Coordinates • More appropriate for • Fields around a wire • Flow in a pipe • Fields in circular waveguide (cavity) • Similar to polar coordinates • x, y, replaced by r and φ (radius and angle) • In 3 dimensions ρ (radial), φ (azimuthal), and z (axial) • Differences with Rectangular • x, y, z, replaced by ρ, φ, z • Unit vectors not constant for ρ and φ • Area and volume elements more complicated • Derivative and divergence expressions more complicated
Converting Cylindrical <--> Rectangular A Ay ρ φ Ax
Cylindrical Coordinates – Areas and Volumes • ρ,φ, z axes • ρ, φ, z axis origins • ρ, φ, z constant surfaces • ρ, φ, z unit vectors aρ, aφ, az mutually perpendicular right-handed (cross product) • Differential area elements ρdρdφ (top), dρdz (side), ρdρdz(outside) • Differential volume element ρdρdφdz
Cylindrical Coordinates – Volume of Cylinder • Volume is
Converting Rectangular to Cylindrical I • General (Cylindrical -> rectangular) • General (Rectangular -> cylindrical) • General vectors in each system • (rectangular) • (cylindrical)
Converting Rectangular to CylindricalII • Find Aρ , Aφ in terms Ax, Ay, Az • Unit vector dot products from diagram
Converting Rectangular to Cylindrical III Example • Transform to cylindrical coordinates • Answer
Spherical Coordinates • More appropriate for • Point sources • Orbital Motion • Atoms (quantum mechanics) • Differences with Rectangular • x, y, z, replaced by r, θ, φ • Unit vectors not constant for r, θ, φ • Area and volume elements more complicated • Derivative and divergence expressions more complicated
Converting Spherical <--> Rectangular • Variables to Rectangular • Variables to Spherical
Spherical Coordinates – Areas and Volumes • r, θ, φ axes • r, θ, φ axis origins • r, θ, φ constant surfaces • r, θ, φ unit vectors ar, aθ, aφ mutually perpendicular right-handed (cross product) • Differential area element r dr dθ (side), rsinθ dr dφ (top), r2sinθ dθ dφ (outside) • Differential volume element r2sinθ dr dθ dφ
Spherical Coordinates – Volume of Sphere • Volume is
Converting Rectangular to Spherical I • Find Aρ , Aφ in terms Ax, Ay, Az • Dot products from diagram
Converting Rectangular to Spherical II • Transform to spherical coordinates ) • Answer
Appendix - Vector Addition C • Method 1 – Tail to Tip Method • Sequential movement “A” then “B”. • Displacement, road trip. • Method 2 – Parallelogram Method • Simultaneous little-bit “A” and little bit “B” • Velocity, paddling across the current • Force, pulling a little in x and a little in y • Method 3 – Components • Break each vector into x and y components • Add all x and y components • Reassemble result B A B C A B = + By Ax Bx
Vector Addition by Components • C = A + B - If sum of A and B can be treated as C • C = Cx + Cy – Then C can be “broken up” as Cx and Cy • Method 3 - Break all vectors into components, add components, reassemble result C B A C Cy Cx
Example – Adding vectors (the easy way) • Car travels 20 km north, then 35 km 60° west of north. Find final position. • Note sines and signs handled by inspection! 35 60° θ 20 β
Vectors – Graphical subtraction • If C = A + B • Then B = C - A B = C + -A • Show A = C + -B C B A -A B C
Vectors – Multiplication by Scalar • Start with vector A • Multiply by constant c • Same direction, just scales the length • Multiply by -c reverses direction • Examples F = ma, p= mv, F = -kx A cA