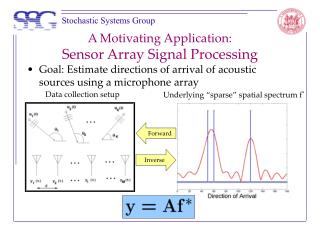
Statistical Signal Processing Algorithms for Time-Varying Sensor Arrays
Statistical Signal Processing Algorithms for Time-Varying Sensor Arrays. Daniel R. Fuhrmann Dept. of Electrical Engineering Washington University St. Louis, MO danf@ee.wustl.edu. David W. Rieken Veridian Systems Division Ann Arbor R&D Facility Ann Arbor, MI David.Rieken@veridian.com.

Statistical Signal Processing Algorithms for Time-Varying Sensor Arrays
E N D
Presentation Transcript
Statistical Signal Processing Algorithms for Time-Varying Sensor Arrays Daniel R. Fuhrmann Dept. of Electrical Engineering Washington University St. Louis, MO danf@ee.wustl.edu David W. Rieken Veridian Systems Division Ann Arbor R&D Facility Ann Arbor, MI David.Rieken@veridian.com
Applications of Time-Varying Arrays • Rigid arrays with predictable motion • E-2C, AWACS • ground-based air surveillance • Rigid arrays with random but measurable motion • F-15, F/A-18 • EW platforms • Ship-mounted radar arrays • Flexible arrays • Towed hydrophone arrays • Wing-mounted radar arrays • Multiple-platform arrays • Aircraft formations • UAV or satellite clusters
Isotropic Sensors Computer Simulation: Rotating ULA
Array Signal Processing Algorithms • Adaptive Beamforming • radar detection • communications arrays • Spatial Spectrum Estimation • radar/sonar imaging, • threat detection • Direction-of-Arrival Estimation • threat localization • fire control radar • Modern algorithms make use of the data covariance matrix to do all of the above.
Outline • Covariance Estimation for Time-Varying Arrays • Spatial Spectrum Estimation • Direction-of-Arrival Estimation
Covariance Estimation for Time-Varying Arrays • Assumptions: • Signal sources and strengths does not change. • Only the array geometry changes. • Array manifold is known at each sample time.
Maximum-Likelihood Covariance Estimation Constrained MLE algorithms: 1) Gradient search. 2) Inverse iterations (introduced for time-varying arrays at ASAP 2001).
Inverse Iteration: Projected: Conjugate Gradient: Computer Simulation - MVDR Spectra m=1 m=2 40 40 30 30 20 20 MVDR (dB) MVDR (dB) 10 10 0 0 -10 -10 -180 -135 -90 -45 0 45 90 135 180 -180 -135 -90 -45 0 45 90 135 180 azimuth azimuth m=3 m=4 40 40 30 30 20 20 MVDR (dB) MVDR (dB) 10 10 0 0 -10 -10 -180 -135 -90 -45 0 45 90 135 180 -180 -135 -90 -45 0 45 90 135 180 azimuth azimuth
Outline • Covariance Estimation for Time-Varying Arrays • Spatial Spectrum Estimation • Direction-of-Arrival Estimation
ML Spatial Spectrum Estimation For K sources, the covariance matrix has the form: Use iterative methods: E-M algorithm. (e.g. Lanterman)
ML Spatial Spectrum Estimation • Azimuth, elevation each discretized at 5o increments for a total of 1387 estimated parameters. • Results shown after 200 iterations. dB • May be possible to estimate from sequence of covariance matrices.
Solving by Least Squares Relationship between covariance matrices and the spatial spectrum: or spectrum samples covariance matrix elements • The Fourier method of radio astronomy (Swenson, 1968) can be derived from this. • Requires many covariance matrices for large images. • Large images formed by inverting large matrices.
Apply MVDR beamformer (Capon, 1969): Modified MVDR
Modified MVDR Therefore, • Can estimate spectrum from estimated covariance matrices. • Technique is non-iterative. • Does not require that the spectrum be estimated over the entire sphere. • Reduces to the MVDR spectrum for M=1.
Outline • Covariance Estimation for Time-Varying Arrays • Spatial Spectrum Estimation • Direction-of-Arrival Estimation
Previous Work • MUSIC (time-invariant): Schmidt (1986). • Single source ML: Friedlander, Zeira (1995). • Interpolated array, focusing matrices: Zeira, Friedlander (1996). • Least squares: Sheinvald, Wax, Weiss (1998). • Arrays of linear arrays: Pesavento, Gershman, Wong (2001).
MUSIC for Matrix Sequences There are K sources. We wish to find the direction of each.
MUSIC for Matrix Sequences where Define the composite data vector as
The projection onto the composite signal subspace is MUSIC for Matrix Sequences The signal is constrained to lie within the intersection of each of the actual data vectors. The signal subspace of the composite data vector is therefore the column span of
MUSIC for Matrix Sequences The MUSIC spectrum is given by
Computer Simulation - MUSIC Spectra Inverse Iterations Sequence Projected Sequence ?
Summary • Covariance estimation is important for many array processing applications. • Time-varying sensor arrays are becoming more common and require different covariance estimation algorithms than do their time-invariant brethren. • We have developed an algorithm which estimates the covariance matrix sequence which arises from a time-varying array and demonstrated the application of that covariance estimate in estimating the direction-of-arrival and the spatial spectrum. • The time-varying nature of an array can be advantageous rather than detrimental. • Performance in real-world situations still not quantified: e.g. imperfections in array manifold calibration, sensor location estimates, etc.
Acknowledgement • This work supported in part by MIT Lincoln Laboratory and the Boeing Foundation.