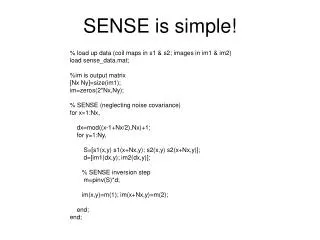
SENSE is simple!
This MATLAB script demonstrates the SENSE (Sensitivity Encoding) technique for reconstructing images using data from multiple coils. It loads necessary data such as coil maps and images, then reconstructs the output image by inverting the sensitivity matrix. The process involves the construction of the sensitivity matrix S from coil data, followed by solving for the reconstructed image using the pseudoinverse. The script supports output for two images and includes basic handling of artifacts using GRAPPA for reduced distortion in EPI sequences.

SENSE is simple!
E N D
Presentation Transcript
SENSE is simple! % load up data (coil maps in s1 & s2; images in im1 & im2) load sense_data.mat; %im is output matrix [Nx Ny]=size(im1); im=zeros(2*Nx,Ny); % SENSE (neglecting noise covariance) for x=1:Nx, dx=mod((x-1+Nx/2),Nx)+1; for y=1:Ny, S=[s1(x,y) s1(x+Nx,y); s2(x,y) s2(x+Nx,y)]; d=[im1(dx,y); im2(dx,y)]; % SENSE inversion step m=pinv(S)*d; im(x,y)=m(1); im(x+Nx,y)=m(2); end; end;
x x x x Basic SENSE x x Coil 1 Coil 2 SENSE reconstructed x x x x Image 1 Image 2
Image Artifacts SENSE GRAPPA
Reduced DistortionEPI, 128x256 Non-Accelerated GRAPPA, R=3