Input and Output Programming
Input and Output Programming. Classical IO devices CPU and IO Interfacing Other Input/Output programming. C hapter 11 Input and Output, Goodman and Miller. Input and Output. Computers and programs have to interact with the external world.

Input and Output Programming
E N D
Presentation Transcript
Input and Output Programming • Classical IO devices • CPU and IO Interfacing • Other Input/Output programming Chapter 11 Input and Output, Goodman and Miller CMPUT 229
Input and Output • Computers and programs have to interact with the external world. • Controlling devices (e.g., sensors) is still one of the major reasons for using assembling languages. • Most I/O devices have a mechanical component making them relatively slow compared to the execution of an instruction. CMPUT 229
Classes of IO Devices • User Interface Devises • Keyboard, mouse, display, printer • Mass storage devises • Hard disc, CD, type driver • Bottom of the memory hierarchy • Gateways and networks • Network protocol • security CMPUT 229
All I/O devices are unpredictable • All I/O devices have their own rate for accepting or generating data • Computers and programs must accommodate themselves to the I/O devices CMPUT 229
Interface between CPU and IO • Primitive input/output “instructions • Syscall • More like function calls • privileged system mode • system level routines provide for efficient and fair usage • Programmed input/output • Asynchronous I/O • Direct Memory Access (DMA) CMPUT 229
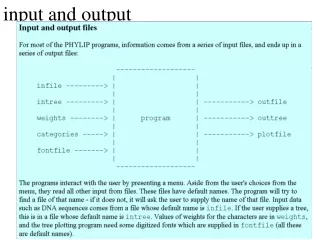
Memory mapped input/output • Simple I/O devices appear superficially like memory • - read/write data to/from a device • How to communicate with I/O? • Treat I/O devises like memory locations • Read: load from the relevant memory • Write: save to the relevant memory • Hardware support (drivers) • intercept the special addresses and treat the operation correctly CMPUT 229
For example lw $2, Keyboard # Read from the keyboard Sw $4, DisplayData # Write to the display • Is the device ready/available ? • An input is ready if it has something to supply • An output is ready if it can accept something • Solutions: each i/o device has two memory units • Status/control variable: to indicate the readyness • Data (buffer): to store the data to be input or to output CMPUT 229
Programmed I/O (busy-waiting) • A simple and extremely inefficient approach is to have the CPU wait or "spin" until the device becomes ready • Reading the Keyboard #------------------------------------------------------ # Read a character from the keyboard into $2 # Bit 31 (MSB) of KeyboardStatus will be set to 1 # when there is a character to read #---------------------------------------------------- Spin: lw $14, KeyboardStatus bgez $14, Spin lw $2, KeyboardData CMPUT 229
Writing to the Display #---------------------------------------- # Write the character in $2 to the display # Bit 31 (MSB) of DisplayStatus will be set to 1 # when the display is ready to accept a character #------------------------------------------------------ Spin: lw $14, DisplayStatus bgez $14, Spin sw $2, DisplayData CMPUT 229
Asynchronous I/O • Programmed I/O is extremely inefficient. Also characters can be lost if device not checked when it has input. • Idea of asynchronous I/O is that CPU does not wait for device to become ready. CMPUT 229
Example: Printing #------------------------------------------------------- # Procedure: PutNextChar # Based on Goodman & Millar, p. 301 # If the Display is ready # grab next character from queue, update the queue, and send it to the display #------------------------------------------------------- .data putqueue: .space 256 pqt: .word 0 # TAIL of Put Queue pqh: .word 0 # HEAD of Put Queue .text PutNextChar: lw $14, DisplayStatus bgez $14, putret # Device not ready lw $26, pqh # Get queue head lw $27, pqt # & tail beq $26, $27, putret # Queue empty addi $26, $26, 1 # (head += 1) % 256 andi $26, $26, 0xff sw $26, pqh lb $26, putqueue($26) # Get head of queue sw $26, DisplayData putret: jr $31 CMPUT 229
PrintingString • loads up queue and initially calls PutNextChar • Main program may periodically call PutNextChar to drive the I/O device CMPUT 229
Example: Reading #--------------------------------------------------- # Procedure: GetNextChar # Based on Goodman & Millar p. 302 # if there is a character there to read # update the queue, read the character, and store it on the queue #----------------------------------------------------------- .data getqueue: .space 256 gqt: .word 0 # TAIL of Get Queue gqh: .word 0 # HEAD of Get Queue .text GetNextChar: lw $14, KeyBoardStatus bgez $14, getret # Device not ready lw $26, gqt # Get queue tail lw $27, gqh # & head addi $26, $26, 1 # (gqt+=1) % 256 andi $26, $26, 0xff beq $26, $27, getret # Queue is full sw $26, gqt lw $27, KeyboardData sb $27, getqueue($26) getret: jr $31 CMPUT 229
GetNextChar called periodically by main program to "drive" the device • Higher level routine GetString accesses the queue when data is needed • GetString can busy-wait on GetNextChar if not enough data available CMPUT 229
Problems: • programmer is responsible for calling the routines to "drive" the devices • time of main program execution and I/O device readiness is still unpredictable • considerable wastage of both CPU and possible loss of data can still occur CMPUT 229
Direct Memory Access (DMA) • to have a simple computer or controller (or channel) load the data directly into memory. • CPU assigns a task to the controller which then loads (or takes) the memory from a set memory location. • Controller has: • - status register/location for indicating completion • - control register/location so CPU can indicate the task requested • CPU supplies both the start memory address and number of bytes to the controller CMPUT 229
Example: Read a block of data from Disc #--------------------------------------------------- # A DMA controller's code to transfer 1k of data into memory beginning at location 0x4400. # Based on Goodman & Millar p. 304 with assumption that memory has already been allocated. #--------------------------------------------------------- .data Count: .word 1024 # Nbytes to transfer Begin_file .word 0x4400 # Memory location at # which load begins .text Initialise: lw $15, Count lw $16, Begin_file # different to text Loop: lw $14, DiskStatus bgez $14, Wait # Device not ready lb $2, DiskData # Get a byte & sb $2, ($16) # store it sub $15, $15, 1 # Count -= 1 add $16, $16, 1 # Point to next memory # location bgtz $15, Loop CMPUT 229
CPU initialises DMA controller at start of task • CPU periodically checks status of controller to see whether task is completed CMPUT 229