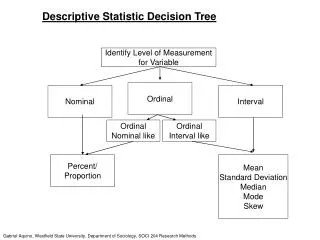
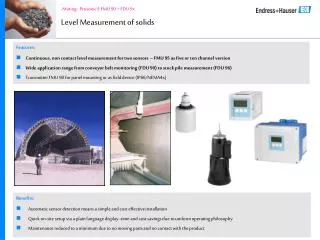
Level Measurement
Level Measurement. Instrument training material. Aim. Knowing the different type of level measuring instrument. Knowing the basic operating principle of different type of level measuring instrument. . Manual Level Measurement Methods. Electrical Level Measurement Methods.


Level Measurement
E N D
Presentation Transcript
Level Measurement Instrument training material
Aim • Knowing the different type of level measuring instrument. • Knowing the basic operating principle of different type of level measuring instrument.
Level Sensing Family • Force • Diaphragm • Weighing • Buoyancy • Pressure • Hydrostatic head • Bubbler • Differential pressure
Maximum Level Normally contains process media but in some application it is filled with a higher density liquid (water or glycol). x Minimum Level y z L H Span =p g x P means the zero value of the measured variable is less than the LRV. LRV =p g y + p g z Suppressed-Zero P F p Where = density of process liquid P p = density of liquid-filled in impulse line F Hydrostatic Head Level Measurement Open Tank URV = LRV + Span
Maximum Level x LP Side must be dry, or no liquid. Minimum Level y z Span =p g x L H P Closed System - Dry Leg LRV =p g y + p g z Condensate Pot collects liquid or condensate from impulse line. P F URV = LRV + Span p Where = density of process liquid P p = density of liquid-filled in impulse line F Hydrostatic Head Level Measurement The same hydrostatic effect as the Open Tank because the LP Side of the transmitter is equalized to the vapor pressure of the process liquid.
Maximum Level x d Minimum Level y z Span=p g x L H P LRV= (p g y + p g z) - (p g)(d + z) Elevated-Zero P F F means the zero value of the measured variable is greater than the LRV. p Where = density of process liquid P p = density of liquid-filled in impulse line F Hydrostatic Head Level Measurement Closed System - Wet Leg Both LP & HP Side must be full of the liquid (wet). Can be the same process liquid or other higher density liquid, normally water or glycol. Seal Pot is used to maintain correct level of seal liquid. URV = LRV + Span
Diaphragm Seal DP Transmitter replaces wet legsto reduce maintenance on applications where the wet leg is not stable or often needs to be refilled. Maximum Level x d Minimum Level y Span =p g x L H P LRV =p g y - p g d p Where = density of process liquid P F P p URV = LRV + Span = density of capillary fill liquid F • Applications: • Extreme hot and cold temperatures • •Corrosive applications • •Clogging or solidifying • •Sanitary requirements
Open Tank Maximum Level x=2000 mm Minimum Level y=125 mm z=250 mm L H Suppressed-Zero Hydrostatic Head Level Measurement Example: An open tank containing water (density = 1000 kg/m3) with the minimum level at 0.125 m above the tapping point and the maximum level at 2 m above the minimum level point. Assume that the transmitter is located 0.25 m below the tapping point. Span = (1000)(9.81)(2000)/100000 = 196.2 mBar LRV = (1000)(9.81)(125)/100000 + (1000)(9.81)(250)/100000 = 36.8 mBar URV = 36.8 + 196.2 = 233 mBar Range = 36.8 to 233 mBar
Maximum Level 4.0 m 2.0 m Minimum Level 1.0 m Process Liquid Density = 850 kg/m3 Fill Liquid Density = 1050 kg/m3 L H Elevated-Zero Hydrostatic Head Level Measurement Span = (850)(9.81)(2000)/100000 = 166.8 mBar LRV = [0 +(1050)(9.81)(1000)/100000] - [(1050)(9.81)(4000)/100000] = 103.0 - 412.0 = -309.0 mBar URV = -309.0 + 166.8 = -142.2 mBar Range = -309.0 to - 142.2 mBar
LEVEL DISPLACEMENT & TORQUE TUBE PRINCIPLE • Changes in liquid level or density are transmitted from the displacer through the torque tube to the transmitter. • Input = 0 - 100 % Level
LEVEL DISPLACEMENT & TORQUE TUBE PRINCIPLE • A Hall-effect sensor converts his rotary motion to an electronic signal. • Changes in magnetic field produces a signal proportional to torque tube movement. • Output = 4 - 20 mA
On-board electronic circuit produces analog output signal proportional to the liquid level. Output = 4 - 20 ma. For pneumatic instruments, the torque tube rotation is converted to 20 - 100 kPa output signal by flapper-nozzle mechanism. Level Displacement & Torque Tube Principle
Level Displacement & Torque Tube Principle • In smart LT, • the analog signal from hall effect sensor is converted into an error-free digital signal • processed by the on-board micro-controller • the digital result is converted to analog output signal • 4 - 20ma DC signal
Displacement Type Level Measurement Fisher 2390 Series Electronic Transmitter Masoneilan 12300 series, 2-wire, loop-powered Smart Level transmitter or Controller with HART Communication Pneumatic Level Transmitter or Controller All operates according to the fully proven liquid displacement and torque tube principle...
E * A D Capacitance = Eo Capacitance Level Measurement • The probe is one plate of the capacitor and the tank wall is the other plate (ground reference), therefore the area of the conductive plates (A) and the distance (D) are practically constant. The variable is the dielectric (E) of the insulating material that separates the plates.
Capacitance Level Measurement • As a tank is filled with media, the amount of capacitance being generated between the probe and the tank wall increases. • The capacitance change, corresponding to the rising or falling of media in a tank, is converted into a pulse wave form proportional to the change in level. • The amplifier then converts the pulse signal into a proportional 4–20 ma output signal, or in case of a point level device yields a contact output change.
Float Type Level Switch • buoyancy principle - "a body (float) immersed in a liquid is buoyed upward by a force equal to the weight of the displaced liquid". • normally used for narrow level differential applications such as high level alarm or low level alarm. • process isolation using non-magnetic enclosing tube • top mounted, side mounted, or external cage. • Switch mechanism - mercury, dry contact, or pneumatic. • A permanent magnet (1) is attached to a • pivoted switch actuator (2). As the float (3) • rises following the liquid level, it raises the • attraction sleeve (4) into the field of the • magnet, which then snaps against the • non-magnetic enclosing tube (5), actuating the switch.
Magnetic Level Gauge Visual liquid level indication has been dominated by sight glasses for many years. During the past ten years, magnetic coupled liquid level indicators have gradually been replacing sight glasses as the preferred visual level indicator. The appeal of this type of level indicator is total isolation of the process within a sealed piping column. Elimination of leaking seals, clouded glasses, broken glass tubing, plus easy access cleaning and adaptation to a variety of mounting styles and process connections. Availability of switches and transmitters adds to their desirability by providing a much less expensive system than a build up of sight glasses, alarm switches and transmitters, all separately piped to the vessel.
Magnetic Level Gauge A single high strength magnet assembly is centered inside the float at the level set point. It is allowed to rise and fall with level change within a non-magnetic piping column. A visual indicator is strapped to the outside of the column, totally isolated from the process liquid. With rising level the flags rotate, changing color. Each flag contains an alignment magnet which reacts to the float magnet and also protects against false actuation. The indicator will always signal true level without field calibration of the visual indicator. Alarm switches and transmitter react to the float's magnetic field through a similar magnetic coupling. Field calibration of set point is achieved by positioning the switch/transmitter on the piping column at the desired set points.
Vibrating Rod (Tuning Fork) Level Measurement • The principle. • Detecting the dampening effect when solids are brought into contact with the vibrating rod. • This vibration is created by exciting the transmit piezoelectric crystal attached at the base of one rod. • The piezoelectric crystal converts electrical energy to mechanical (vibratory) energy.
Vibrating Rod (Tuning Fork) Level Measurement • The principle…. Cont… • The vibratory energy from one rod is transmitted to the other rod, setting it into vibration, and establishing resonance vibration between the rods. • In free space, both the rods vibrates at their natural frequency. • When solids come into contact with the rod, the vibration is dampened, decreasing the electrical signal, providing relay actuation.
Vibrating Rod (Tuning Fork) Level Measurement • The vibration, • Detected by the receive piezoelectric crystal, • Converted to low level electrical energy. • The electronics receive the low voltage signal from the receive crystal and amplify it. • The amplified signal is compared to the set point in the comparator circuit which determines relay operation. • The signal is then filtered to remove unwanted frequency; • It is amplified and sent to the transmit crystal to create the vibration.
Ultrasonic Level Measurement • A non conductive type transmitter. • The transmitter (electronics) sends an electrical signal to the transducer sensor crystal, which causes the crystal to vibrate and emit an ultrasonic pulse. • The sound pulse is directed toward the liquid surface where it is reflected as an echo back to the transducer, again causing it to vibrate. • The electronics detects when the return echo is received, and converts the time interval into a distance.
Ultrasonic level measurement utilizes the simple equation. D = distance . t = function of the time required for an ultrasonic pulse to travel at the speed of sound(Va) from the face of the transducer to the reflecting surface and back to the transducer. The instrument is, therefore, performing a timing function to determine the level. Va * t 2 D = Ultrasonic Non-contact Level Measurement
Ultrasonic Non-contact Level Measurement • As the level of the media moves, the time interval for the signal return also changes. • The transmitter converts this time interval to a direct reading of level. • Condition for measurement: • The transducer is mounted above the maximum level of the. • Media to be measured with the ultrasonic pulse directed at the surface of the media.
24 Vdc, 4 – 20 mA Loop Powered 120 Vac Lined Powered Air, r = 1.0 Reflected Signal Transmitted Signal Liquid, r >1.4 Guided Wave type Non-contact type Radar Level Measurement • Transmitting high frequency GHz electromagnetic radiation • Time the transit time to & from level surface • Similar to ultrasonic instrument • Not affected by sound where ultrasonic is
Radar Level Measurement • The signal strength reflected back from liquid surface to instrument is directly related to the dielectric constant of the liquid. • Liquid with low dielectric reflect very little of the signal. • Non-contact type will have energy loss on the return. • Guided-wave radar is based on Time Domain Reflectometer (TDR) technology which use pulses of electromagnetic energy that transmitted down the probe tube.
The End of Level Temperature to come….. See You….