Autonomous Game Agents
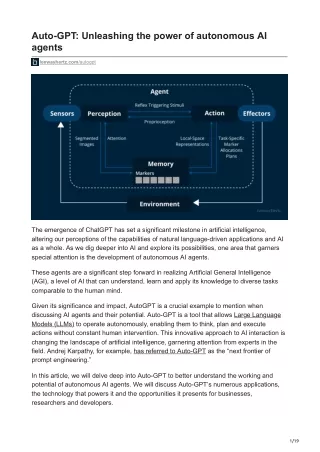
Autonomous Game Agents. CIS 479/579 Bruce R. Maxim UM-Dearborn. Agent Movement Layers. Action Selection Agent chooses goals and decides which plan to follow (e.g. do A, B, and then C) Steering Calculating desired trajectories needed to satisfy the goals and plans from action layer

Autonomous Game Agents
E N D
Presentation Transcript
Autonomous Game Agents CIS 479/579 Bruce R. Maxim UM-Dearborn
Agent Movement Layers • Action Selection • Agent chooses goals and decides which plan to follow (e.g. do A, B, and then C) • Steering • Calculating desired trajectories needed to satisfy the goals and plans from action layer • Locomotion • Mechanical (how) aspects of the agent’s movement (allows body type customization)
Problems • Implementing steering behaviors brings new challenges to game programmers • Some behaviors requires lots of manual tweaking to look right • Need to avoid using lots of CPU time • When combining behaviors, it is possible that they may accidentally cancel each other out
Vehicle Model - 1 • This class handles the location layer • All moving game agents are derived from the MovingEntity class which is itself derived from the BaseGameEntity class the critical data attributes include • ID • type • position • bounding radius • scale
Vehicle Model - 2 • The vehicle’s heading and side vectors are used to define a local coordinate system and will be updated by the steering algorithms every frame • The vehicle’s heading will always be aligned with its velocity • The Vehicle class is derived from the class MovingGameEntity and inherits its own instance of the SteeringBehavior class
Vehicle Model - 3 • The Vehicle class contains a pointer to a GameWorld class instance to enable access to all pertinent obstacle, path, or agent data • Physics updating is handled by the Vehicle::Update method • The display area is assumed to wrap around itself (left to right and top to bottom)
Update - 1 // Updates the vehicle's position from a series of steering behaviors void Vehicle::Update(double time_elapsed) { //update the time elapsed m_dTimeElapsed = time_elapsed; //keep a record of its old position to allow later update Vector2D OldPos = Pos(); Vector2D SteeringForce; //calculate combined force from steering behaviors in vehicle's list SteeringForce = m_pSteering->Calculate(); //Acceleration = Force/Mass Vector2D acceleration = SteeringForce / m_dMass; //update velocity m_vVelocity += acceleration * time_elapsed; //make sure vehicle does not exceed maximum velocity m_vVelocity.Truncate(m_dMaxSpeed); //update the position m_vPos += m_vVelocity * time_elapsed;
Update - 2 //update the heading if the vehicle has a non zero velocity if (m_vVelocity.LengthSq() > 0.00000001) { m_vHeading = Vec2DNormalize(m_vVelocity); m_vSide = m_vHeading.Perp(); } //Enforce NonPenetration constraint, treat screen as a toroid WrapAround(m_vPos, m_pWorld->cxClient(), m_pWorld->cyClient()); //update vehicle's current cell if space partitioning is turned on if (Steering()->isSpacePartitioningOn()) { World()->CellSpace()->UpdateEntity(this, OldPos); } if (isSmoothingOn()) { m_vSmoothedHeading = m_pHeadingSmoother->Update(Heading()); } }
Seek // Given a target, this behavior returns a steering force which will // direct the agent towards the target Vector2D SteeringBehavior::Seek(Vector2D TargetPos) { Vector2D DesiredVelocity = Vec2DNormalize(TargetPos - m_pVehicle->Pos()) * m_pVehicle->MaxSpeed(); return (DesiredVelocity - m_pVehicle->Velocity()); } // Left mouse button controls the target position // Overshoot is determined by values of MaxSpeed (use Ins/Del keys) // and MaxForce (use Home/End keys)
Flee // Given a target, this behavior returns a steering force which will // direct the agent away from the target Vector2D SteeringBehavior::Flee(Vector2D TargetPos) { //only flee if the target is within 'panic distance'. Work in distance //squared space (to avoid needing to call the sqrt function const double PanicDistanceSq = 100.0f * 100.0; if (Vec2DDistanceSq(m_pVehicle->Pos(), target) > PanicDistanceSq) { return Vector2D(0,0); } Vector2D DesiredVelocity = Vec2DNormalize(m_pVehicle->Pos() - TargetPos) * m_pVehicle->MaxSpeed(); return (DesiredVelocity - m_pVehicle->Velocity()); } // Left mouse button controls the target position // Overshoot is determined by values of MaxSpeed (use Ins/Del keys) // and MaxForce (use Home/End keys)
Arrive - 1 // Similar to seek but it tries to arrive at target with a zero velocity Vector2D SteeringBehavior::Arrive(Vector2D TargetPos, Deceleration deceleration) { Vector2D ToTarget = TargetPos - m_pVehicle->Pos(); //calculate the distance to the target double dist = ToTarget.Length(); if (dist > 0) { //value is required to provide fine tweaking of the deceleration. const double DecelerationTweaker = 0.3; //calculate speed required to reach target given desired deceleration double speed = dist / ((double)deceleration * DecelerationTweaker);
Arrive - 2 //make sure the velocity does not exceed the max speed = min(speed, m_pVehicle->MaxSpeed()); //similar to Seek don't need to normalize the ToTarget vector //because we have calculated its length: dist. Vector2D DesiredVelocity = ToTarget * speed / dist; return (DesiredVelocity - m_pVehicle->Velocity()); } return Vector2D(0,0); }
Illusion of Pursuit • Don’t simply seek old enemy position • Need to run toward enemy’s new position based on observed movement • The trick is trying to figure out how far in the future to predict movement • Might also add to the realism of the behavior if some time were added to slow down, turn, and accelerate back to speed
Pursuit // Creates a force that steers the agent towards the evader Vector2D SteeringBehavior::Pursuit(const Vehicle* evader) { //if evader ahead and facing agent then seek evader's current position. Vector2D ToEvader = evader->Pos() - m_pVehicle->Pos(); double RelativeHeading = m_pVehicle->Heading().Dot(evader->Heading()); if ( (ToEvader.Dot(m_pVehicle->Heading()) > 0) && (RelativeHeading < -0.95)) //acos(0.95)=18 degs { return Seek(evader->Pos()); } //Not considered ahead so we predict where the evader will be. //lookahead time is proportional to the distance between evader and //pursuer; and inversely proportional to sum of agent's velocities double LookAheadTime = ToEvader.Length() / (m_pVehicle->MaxSpeed() + evader->Speed()); //now seek to the predicted future position of the evader return Seek(evader->Pos() + evader->Velocity() * LookAheadTime); }
Evade // agent Flees from the estimated future position of the pursuer Vector2D SteeringBehavior::Evade(const Vehicle* pursuer) { // no need check for facing direction (unlike pursuit) Vector2D ToPursuer = pursuer->Pos() - m_pVehicle->Pos(); //Evade only considers pursuers within a 'threat range' const double ThreatRange = 100.0; if (ToPursuer.LengthSq() > ThreatRange * ThreatRange) return Vector2D(); // lookahead time is propotional to distance between evader and // pursuer; and inversely proportional to sum of agents' velocities double LookAheadTime = ToPursuer.Length() / (m_pVehicle->MaxSpeed() + pursuer->Speed()); //now flee away from predicted future position of the pursuer return Flee(pursuer->Pos() + pursuer->Velocity() * LookAheadTime); }
Illusion of Wandering • Make agent appear to follow a random walk through game environment • Do not calculate a random steering force each step or you will get spastic agent behavior and no persistent focused motion • One technique to avoid the jitters is to project an imaginary target moving on a circular path having a fixed wander radius (but moving center) in front of the agent and let the agent seek
Wander - 1 // This behavior makes the agent wander about randomly Vector2D SteeringBehavior::Wander() { //this behavior is dependent on the update rate, so this line must //be included when using time independent framerate. double JitterThisTimeSlice = m_dWanderJitter * m_pVehicle->TimeElapsed(); //first, add a small random vector to the target's position m_vWanderTarget += Vector2D(RandomClamped() * JitterThisTimeSlice, RandomClamped() * JitterThisTimeSlice); //reproject this new vector back on to a unit circle m_vWanderTarget.Normalize(); //increase length of vector to be same as radius of wander circle m_vWanderTarget *= m_dWanderRadius;
Wander - 2 //move the target into a position WanderDist in front of the agent Vector2D target = m_vWanderTarget + Vector2D(m_dWanderDistance, 0); //project the target into world space Vector2D Target = PointToWorldSpace(target, m_pVehicle->Heading(), m_pVehicle->Side(), m_pVehicle->Pos()); //and steer towards it return Target - m_pVehicle->Pos(); } // Green circle is “Wander Circle” and the dot is the target // Can control radius, distance, and jitter using keyboard
Obstacle Avoidance • Obstacles are any game objects that can be approximated using circle in 2D or a sphere in 3D • The goal is to apply an appropriate steering force to keep a bounding box (2D) surrounding the agent (or bounding parallelepiped in 3D) from intersecting any obstacles • The box width matches bounding radius and length is proportional to agent speed
Find Closest Intersection Point • Vehicle only needs to consider the obstacles within range of its detection box (needs to iterate though list and tag obstacles in range) • Tagged obstacles positions transformed to vehicle local space (allows negative coordinates to be discarded) • Check for detection box and bounding circle overlap (reject any with y values smaller than half the width of the detection box) • Apply appropriate steering force to prevent collision with nearest obstacle
Steering Force • Two parts: lateral force and braking force • To adjust the lateral force simply subtract the obstacle’s local position form its radius (can be scaled by the distance from obstacle) • The braking force is directed horizontally backward from the obstacle (its strength should be proportional to the distance) • Let’s look at the code
Wall Avoidance • Wall is line segment (2D) with normal pointing in the direction it faces (polygon in 3D) • Steering is accomplished using 3 feelers projected in front of agent and testing for wall intersections • Once closest intersection wall is found a steering force is calculated (scaled by penetration depth of feeler into the wall) • Let’s look at the code
Interpose - 1 // returns force that attempts to position vehicle between 2 others // demo shows red vehicle trying to come between two blue wanderers Vector2D SteeringBehavior::Interpose(const Vehicle* AgentA, const Vehicle* AgentB) { //first we need to figure out where the agents are going to be at //time T in the future. Approximate by determining the time taken to //reach the midway point at the current time at at max speed. Vector2D MidPoint = (AgentA->Pos() + AgentB->Pos()) / 2.0; double TimeToReachMidPoint = Vec2DDistance(m_pVehicle->Pos(),MidPoint) / m_pVehicle->MaxSpeed();
Interpose - 2 //assume that agent A and agent B will continue on a straight //trajectory and extrapolate to get their future positions Vector2D APos = AgentA->Pos() + AgentA->Velocity() * TimeToReachMidPoint; Vector2D BPos = AgentB->Pos() + AgentB->Velocity() * TimeToReachMidPoint; //calculate the mid point of these predicted positions MidPoint = (APos + BPos) / 2.0; //then steer to Arrive at it return Arrive(MidPoint, fast); }
Hide • Goal is to position vehicle so that obstacle is between itself and the hunter • Determine a hiding spot behind each obstacle using GetHidingPosition • The Arrive method is used to steer to the closest hiding point • If no obstacles are available the Evade method is used to avoid hunter • Let’s look at the code
Path Following • Creates a steering force that moves a vehicle along a series of waypoints • Paths may be open or closed • Can be used for agent patrol routes or racecar path around a track • Helpful to have a path class that stores waypoint list and indicates “open” or “closed” • Then Seek or Arrive can be used to get the desired path following behavior
FollowPath - 1 // Given a series of Vector2Ds, this method produces a force that will // move the agent along the waypoints in order. The agent uses the // 'Seek' behavior to move to the next waypoint - unless it is the last // waypoint, in which case it 'Arrives' Vector2D SteeringBehavior::FollowPath() { //move to next target if close enough to current target (working in //distance squared space) if(Vec2DDistanceSq(m_pPath->CurrentWaypoint(), m_pVehicle->Pos()) < m_dWaypointSeekDistSq) { m_pPath->SetNextWaypoint(); }
FollowPath - 2 if (!m_pPath->Finished()) { return Seek(m_pPath->CurrentWaypoint()); } else { return Arrive(m_pPath->CurrentWaypoint(), normal); } }
Offset Pursuit • Calculates a steering force to keep an agent at a specified distance from a target agent • Marking opponents in sports • Docking spaceships • Shadowing aircraft • Implementing battle formations • Always defined in leader space coordinates • Arrive provides smoother behavior than Seek
OffsetPursuit // Keeps a vehicle at a specified offset from a leader vehicle Vector2D SteeringBehavior::OffsetPursuit(const Vehicle* leader, const Vector2D offset) { //calculate the offset's position in world space Vector2D WorldOffsetPos = PointToWorldSpace(offset, leader->Heading(), leader->Side(),leader->Pos()); Vector2D ToOffset = WorldOffsetPos - m_pVehicle->Pos(); //lookahead time is propotional to distance between leader and //pursuer; inversely proportional to sum of both agent velocities double LookAheadTime = ToOffset.Length() / (m_pVehicle->MaxSpeed() + leader->Speed()); //now Arrive at the predicted future position of the offset return Arrive(WorldOffsetPos + leader->Velocity() * LookAheadTime, fast); }
Flocking • Emergent behavior that appears complex and purposeful, but is really derived from simple rules followed blindly by the agents • Composed out of three group behaviors • Cohesion (steering toward neighbors’ center of mass) • Separation (creates force that steers away from neighbors) • Alignment (keeps agent heading in the same direction as neighbors) • Flocking demo allows us to examine the effects of each and experiment • The code for each function is defined separately
Combining Steering Behavior • In an FPS you might want a bot that combines path following, separation, and wall avoidance • In an RTS you might want a group of bots to flock together while wandering, avoiding obstacles, and evading enemies • The steering class used in Buckland allows you to turn on the behaviors you want for each class instance and combine them when computing the appropriate steering force
Combination Strategies • Weighted truncated sum • Weighted truncated sum with pioritization • Prioritized dithering
Ensuring Zero Overlap • Add non-penetrating constraint
Spatial Partitioning • If you have lot of agents and you need to check all for neighbors this requires O(n2) • The cell space partitioning method can reduce the checks to O(n) • Check agents bounding radius to see which cells it intersects in the world grid • These cells are checked of presence of agents • All nearby agents in range are added to the neighbor list • You can observe the effects of turning cell partitioning on and off in Another_Big_Shoal.exe
Smoothing • Judders can be caused by two conflicting behaviors obstacle avoidance (turn away from enemy) and seek (no threat turn back to original direction of travel) • You could decouple the heading form the velocity vector and base the heading on the average of several recent steps