Download
1 / 11
110 likes | 129 Vues
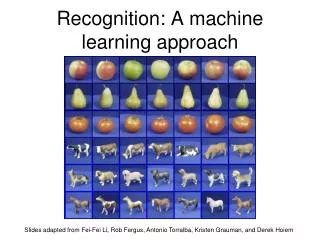
Explore how a machine learning approach aids mobile robots in visually perceiving forest trails. Discussions include steering control, obstacle detection, path planning, and visual odometry. Learn about an image classification problem with trail orientations and classifier accuracy. Discover how a Deep Neural Network interprets trail directions and assists in control decisions. The study concludes with the success of a machine learning approach in trail perception, achieving comparable performance to humans.

E N D
A Machine Learning Approach to the Visual Perception of Forest Trails for Mobile Robots A. Giusti, J. Guzzi, D. Ciresan, F. LinHe, J. Pablo RodríguezF. Fontana, M. Faessler, C. ForsterJ. Schmidhuber, G. Di Caro, D. Scaramuzza, L. Gambardella IDSIA, USI-SUPSI, Lugano, SwitzerlandRPG, Universityof Zurich, Switzerland
Our focus Perception of the trail direction Mapping Obstacle perceptionand avoidance Path Planning Visual Odometry Control
A challenging pattern recognition problem Trail heading left Trail heading straight ahead Trail heading right
An image classification problem P(trail is left) Raw pixel values Input P(trail is straight) Deep Neural Network P(trail is right)
Classification accuracy Our classifier (accuracy: 85%) Human observer (accuracy: 86%)
Conclusions • Pure machine learning approach to trail perception • Performance comparable to humans when tested on individual frames of the test set • Onboard odroid U3 runs SVO pipeline and DNN at more than 15FPS