Download

1 / 1
10 likes | 127 Vues
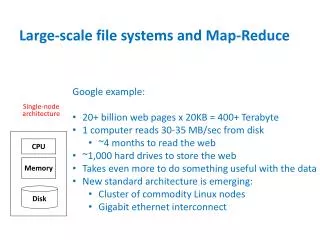
Horizontal Configuration. Vertical Configuration. Large Scale 3D Range Map Generation and Fusion d Kishore Pochiraju, Hao Men, Biruk Gebre. 10th. 40th. Start: Red: Model Blue: Data. 1 th iteration: Red: Model White: Data. 14 th iteration: Red: Model Green: Data. 27 th iteration:

E N D
Horizontal Configuration Vertical Configuration Large Scale 3D Range Map Generation and FusiondKishore Pochiraju, Hao Men, Biruk Gebre 10th 40th Start: Red: Model Blue: Data 1th iteration: Red: Model White: Data 14th iteration: Red: Model Green: Data 27th iteration: Red: Model Yellow: Data 50th iteration: Red: Model Green: Data Design & Manufacturing Institute • Overview • Stevens Remotely Operated and Autonomous Mapping System (ROAMS) was developed for building high resolution 3D maps of Terrains and urban environments. • ROAMS Can be Remotely through the use of an OCU (Operator Control Unit) or can be operated in a semi-autonomous mode. • 3D scans are acquired using a 2D Laser range scanner (LIDAR) mounted on an adaptively controlled three-degree of freedom actuator. • ROAMS could provide 3D environment scan with approximate 6DOF location information. • A variant of the Iterative Closest Point (ICP) algorithm is developed to merge 3D scan range data from different locations together, for constructing large scale 3D range maps. 20th 50th • Carnegie Building (Design & Manufacturing Institute) 3D Scan. • Color 3D Scan Provide More Detail Information Than Range Scan. 3D Map Fusion • Iterative Closest Point Algorithm For 3D Map Fusion • Closest Point Association • Construct k-d tree of model point cloud (3D range data). • For every point in data point cloud , search the closest point in 3D space in model and associate. • Color ICP search in 4D space, includes a hue vector which stands for color, provides higher accuracy and computation speed. • Compute Rigid Transformation • Construct a matrix from associated points. • Calculate Rotation & Translation Matrix from Singular Value Decomposition (SVD) of constructed matrix. • Error Evaluation • Average distance of associated points. • Examples of ICP 3D Fusion • Bunny Statue 3D Reconstruction with Major Overlapping Area. • Bunny Statue 3D Reconstruction with Very Limited Overlapping. • ROAMS Specs • All Electric ATV • Power: 37 V Li-ion Battery (propulsion), 24V Lead Acid (Electronics) • Max Speed: 10 + mph • Run Time: 12 – 14 hours • Weight: 250 lb + 100 lb payload • 10% + grade climb ability • RC Joystick control (Close Range ) • Tele-operable using OCU (Long Range) • Sensor Package • 1 high precision LIDAR (8/80m), 800m LIDAR option • 3 wide angle Video Cameras • 8 Front and back mounted IR proximity distance sensors • 2 wheel mounted Speed encoders • 1 steering Potentiometer • Battery Voltage sensors • GPS receiver • Low cost IMU • Network • CISCO long range power injected onboard radio – 802.11g • P2P : Latency managed SMART data communications system. 30th • ROAMS Generated 3D Maps • Stevens Lower Campus 3D Map From 9 Scan Locations.