Download
1 / 1
10 likes | 163 Vues
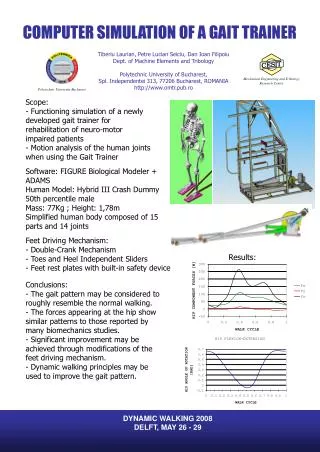
This study presents a functioning simulation of a newly developed gait trainer intended for rehabilitating patients with neuro-motor impairments. Utilizing the ADAMS software for motion analysis, the model represents a simplified human anatomy comprising 15 parts and 14 joints. The results indicate that the gait pattern produced by the trainer closely resembles normal walking, with hip force patterns aligning with existing biomechanical studies. Suggestions are made for enhancing the driving mechanism to further improve gait performance, highlighting dynamic walking principles in design.

E N D
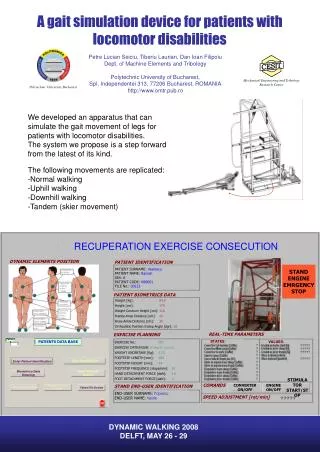
Mechanical Engineering and Tribology Research Center Polytechnic University Bucharest COMPUTER SIMULATION OF A GAIT TRAINER Tiberiu Laurian, Petre Lucian Seiciu, Dan Ioan Filipoiu Dept. of Machine Elements and Tribology Polytechnic University of Bucharest,Spl. Independentei 313, 77206 Bucharest, ROMANIA http://www.omtr.pub.ro Scope: - Functioning simulation of a newly developed gait trainer for rehabilitation of neuro-motor impaired patients - Motion analysis of the human joints when using the Gait Trainer Software: FIGURE Biological Modeler + ADAMS Human Model: Hybrid III Crash Dummy 50th percentile male Mass: 77Kg ; Height: 1,78m Simplified human body composed of 15 parts and 14 joints Feet Driving Mechanism: - Double-Crank Mechanism - Toes and Heel Independent Sliders - Feet rest plates with built-in safety device Results: Conclusions: - The gait pattern may be considered to roughly resemble the normal walking. - The forces appearing at the hip show similar patterns to those reported by many biomechanics studies. - Significant improvement may be achieved through modifications of the feet driving mechanism. - Dynamic walking principles may be used to improve the gait pattern. DYNAMIC WALKING 2008 DELFT, MAY 26 - 29