Download

1 / 43
460 likes | 718 Vues
LA RELATION ASSIETTE/TRAJECTOIRE/VITESSE. LA COMPENSATION. Objectifs :. Savoir prendre et maintenir une vitesse précise ;. Annuler les efforts permanents exercés sur la profondeur. Retour au sommaire général. Version 2 - avril 2004. LA RELATION ASSIETTE/TRAJECTOIRE/VITESSE.

E N D
LA RELATION ASSIETTE/TRAJECTOIRE/VITESSE LA COMPENSATION Objectifs : • Savoir prendre et maintenir une vitesse précise ; • Annuler les efforts permanents exercés sur la profondeur. Retour au sommaire général Version 2 - avril 2004
LA RELATION ASSIETTE/TRAJECTOIRE/VITESSE LA COMPENSATION PRÉ-REQUIS CONNAISSANCES INDISPENSABLES LEÇONS EN VOL Retour au sommaire général Bibliographie et références
PRÉ-REQUIS • Le pilotage de l’assiette.
CONNAISSANCES INDISPENSABLES • L’ANÉMOMÈTRE • RAPPELS DE MÉCANIQUE DU VOL • LE COMPENSATEUR
L’ANÉMOMÈTRE • DESCRIPTION • PRISE DE PRESSION TOTALE • PRISES DE PRESSION STATIQUE • PRINCIPE DE FONCTIONNEMENT DE L’ANÉMOMÈTRE
L’anémomètre ou Badin, du nom de son inventeur Il indique la vitesse Vi du planeur par rapport à l’air. La pression dynamique Pd générée par l’écoulement de l’air sur le planeur est proportionnelle au carré de la vitesse du planeur, Pd = Pt – Ps ; le mécanisme de l’anémomètre est donc raccordé aux prises de pressions totale et statique qu’il compare. CORDIER Guillaume – mai 2004
Prises de pression totale Prise de pression totale Prise de pression totale Note : ne pas confondre prise de pression totale et antenne de compensation ! CORDIER Guillaume – mai 2004
Psdroite+Psgauche 2 Prises de pression statique Elles captent la pression atmosphérique régnant autour du planeur ; Prises de pression statique elles sont réparties symétriquement sur le fuselage, Psdroite Ps= Psgauche pour que la pression Ps retenue reste juste en cas de dérapage. CORDIER Guillaume – mai 2004
Principe de fonctionnement de l’anémomètre Ps Ps est appliquée dans un boîtier étanche, Ps Pt est appliquée dans une capsule anéroïde. Pt Pd = Pt - Ps Les déformations de la capsule (donc les déplacements de l’aiguille), résultentde la différence Pd des 2 pressions Ps etPt, représentative de la vitesse. par construction, il n’y a pas de retard d’indication de l’anémomètre. Conclusion : CORDIER Guillaume – mai 2004
RAPPELS DE MÉCANIQUE DU VOL • ASSIETTE CONSTANTE VITESSE CONSTANTE • ANALOGIE AVEC UNE BOULE SUR UN PLAN INCLINÉ • RETOUR AU PLANEUR ! • STABILISATION D’UNE VITESSE PLUS ÉLEVÉE
À l’équilibre : RA trajectoire axe longitudinal horizon Vent relatif (VR) = constante P la trajectoire dans le plan vertical est rectiligne, RA=P : la pente de trajectoire est constante. CORDIER Guillaume – avril 2004
RA trajectoire axe longitudinal horizon Px Rx Vent relatif (VR) Px=P x sin = constante ( et P sont constants), = constante Px=Rx, la vitesse est constante. P Conclusion : vitesse constante assiette constante CORDIER Guillaume – avril 2004
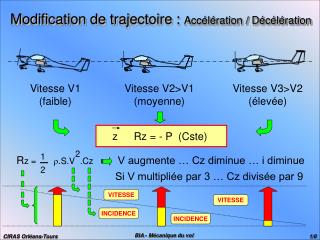
Analogie avec une boule sur un plan incliné C’est la composante horizontale Px du poids qui permet et entretient le mouvement de la boule. Px=P x sin On a : trajectoire Px Px faible P P forte L’expérience montre que plus est forte, plus la vitesse est forte. Conclusion : On contrôlera la vitesse du planeur en adaptant notre pente de descente. CORDIER Guillaume – juin 2004
Retour au planeur ! RA trajectoire axe longitudinal Rx horizon Px faible P vitesse faible faible CORDIER Guillaume – avril 2004
trajectoire RA axe longitudinal Rx horizon Px forte P vitesse forte forte CORDIER Guillaume – avril 2004
Vitesse stabilisée 1 RA1 trajectoire axe longitudinal horizon Px Rx a1 1 RA1=P Px=P x sin 1 P Px=Rx CORDIER Guillaume – avril 2004
Pré affichage d’une assiette plus piquée 2 trajectoire RA2 axe longitudinal horizon variation d’assiette à piquer a2 a2<a1 RA2<RA1 P Il y a rupture de l’équilibre RA/ P dans le plan vertical : ( augmente). la trajectoire s’incurve vers le bas CORDIER Guillaume – avril 2004
Accélération 3 trajectoire axe longitudinal horizon Px2 Rx Px2>Px1 car 2 >1 2 >1 P Il y a rupture de l’équilibre Px/Rx (Px2>Rx) : la vitesse augmente (avec inertie). CORDIER Guillaume – avril 2004
Stabilisation de la nouvelle vitesse 4 trajectoire RA axe longitudinal horizon Px2 Rx 2 P La vitesse augmentant : L’équilibre RA/ Pest retrouvé : • RA augmente la trajectoire se stabilise sur une pente plus forte. L’équilibre Px/Rxest retrouvé : • Rx augmente la nouvelle vitesse, plus élevée, se stabilise. CORDIER Guillaume – avril 2004
équilibre - vitesse stabilisée P P Résumons-nous… RA1 pré affichage de l’assiette accélération Rx1 stabilisation de la nouvelle Vi RA2 Px1 RA3 Rx2 Px2 P Rx3 Px3 l’incidence diminue ; variation d’assiette à piquer : RAdevient inférieure à P : la trajectoire s’incurve vers le bas ; sur cette nouvelle trajectoire, Px>Rx : la vitesse augmente. CORDIER Guillaume – juillet 2004
LE COMPENSATEUR • COMPENSATEUR À RESSORT • COMPENSATEUR AÉRODYNAMIQUE
Compensateur à ressort Description commande du compensateur gouverne de profondeur verrouillage manche à balai timonerie ressort CORDIER Guillaume – avril 2004
Compensateur à ressort Principe de fonctionnement effort permanent sur le manche vers l’avant compensateur « à piquer » effort permanent sur le manche vers l’arrière compensateur « à cabrer » CORDIER Guillaume – avril 2004
Compensateur aérodynamique Description Volet de compensation Gouverne angle de braquage de la gouverne CORDIER Guillaume – avril 2004
angle de braquage de la gouverne Compensateur aérodynamique Principe de fonctionnement fc Fg . d fc. D = d compensateur « à piquer » D Fg compensateur « à cabrer » CORDIER Guillaume – avril 2004
LEÇONS EN VOL • RELATION ASSIETTE-TRAJECTOIRE-VITESSE • LA COMPENSATION
RELATION ASSIETTE-TRAJECTOIRE-VITESSE • ASSIETTE STABLE VITESSE STABLE • OBTENTION D’UNE VITESSE PLUS ÉLEVÉE • OBTENTION D’UNE VITESSE PLUS FAIBLE • RÉSUMONS-NOUS ! • CIRCUIT VISUEL
Assiette constante vitesse stable L’assiette est constante : A la Vi est stable CORDIER Guillaume – juin 2004
Obtention d’une vitesse plus élevée pré affichage d’une assiette plus piquée : A1 variation d’assiette à piquer A2 Revoir l’animation Vi augmente avec inertie… puis se stabilise CORDIER Guillaume – juin 2004
assiette plus piquée stabilisée : A2 Vi plus élevée stabilisée CORDIER Guillaume – juin 2004
Obtention d’une vitesse plus faible pré affichage d’une assiette plus cabrée : A2 variation d’assiette à cabrer A1 Revoir l’animation Vi diminue avec inertie… puis se stabilise CORDIER Guillaume – juin 2004
assiette plus cabrée stabilisée : A2 Vi plus faible stabilisée CORDIER Guillaume – juin 2004
A assiette stable Vi stable lecture de la Vi actuelle choix d’une nouvelle Vi choix d’une Vi plus élevée choix d’une Vi moins élevée Pré-affichage et stabilisation d ’une assiette plus piquée Pré-affichage et stabilisation d ’une assiette plus cabrée A + piquée A + cabrée correction correction lecture de la Vi obtenue : la Vi augmente… puis se stabilise la Vi diminue… puis se stabilise Vi obtenue = Vi souhaitée Vi obtenue < Vi souhaitée Vi obtenue > Vi souhaitée CORDIER Guillaume – avril 2004
Circuit visuel références visuelles (horizon/repère capot) lecture de l’anémomètre références visuellespour effectuer la variation d’assiette A1 balayage de l’environnement extérieur A2 références visuellespour stabiliser l’assiette choisie balayage de l’environnement extérieur références visuellespour contrôler la bonne tenue de l’assiette balayage de l’environnement extérieurpendant que la vitesse se stabilise correction éventuelle lecture de l’anémomètre CORDIER Guillaume – juin 2004
LA COMPENSATION • PERCEPTION DE L’EFFORT AU MANCHE • UTILISATION DU COMPENSATEUR
Perception de l’effort au manche Le planeur étant compensé à l’assiette de référence, l’élève préaffiche une assiette plus piquée, pour obtenir une Vi plus élevée : Aréf. variation d’assiette à piquer A2 Vi augmente avec inertie… puis se stabilise CORDIER Guillaume – juin 2004
Pour maintenir cette Vi plus élevée, il est nécessaire d’exercer une action permanente sur le manche vers l’avant. A2 CORDIER Guillaume – juin 2004
Utilisation du compensateur En conservant l’assiette constante, on déplace le compensateur dans le sens de l’effort au manche. Effort permanent sur le manche vers l’avant on déplace le compensateur vers l’avant puis on relâche son action sur le manche pour vérifier le réglage du compensateur. CORDIER Guillaume – juin 2004
de même : Effort permanent sur le manche vers l’arrière on déplace le compensateur vers l’arrière puis on relâche son action sur le manche pour vérifier le réglage du compensateur. CORDIER Guillaume – juin 2004
Exercices Stabilisation de vitesses très différentes avec compensation adaptée Pour ne pas gêner la perception des efforts aux commandes, l’instructeur ne doit pas intervenir directement sur les commandes. note : Seul l’élève manipulera le compensateur. L’erreur à éviter On ne pilote pas au compensateur ! CORDIER Guillaume – Juin 2004
BIBLIOGRAPHIE et RÉFÉRENCES Manuel du pilote vol à voile Mouvement du planeur – Phase 2 / p°31 et 34 Changement de trajectoire dans le plan vertical – Phase 2 / p°37 Relation assiette-trajectoire-vitesse – Phase 2 / p°42 Guide de l’instructeur vol à voile Relation assiette-trajectoire-vitesse p°41 à 44 Instruments de bord Mesure de la vitesse – Chap.III / p°11 à 14 Mécanique du vol des planeurs p°23 à 27 Analogie avec une boule sur un plan incliné p°23 Contrôle de la vitesse du planeur p°23 Efforts sur les commandes-compensation p°26 Utilisation du compensateur-transfert des efforts p°27