Download

1 / 13
160 likes | 489 Vues
Flygteknik 2010 Oct 19 MIDCAS – Sense and Avoid for UAS Bengt-Göran Sundqvist, Saab AB. Mid Air Collisions . 2006 South America. LUNA (UAV) over Afghanistan. Combat training. 2002 Überlingen. Layers of Protection Against Mid Air Collisions. Strategic Conflict Management Procedures

E N D
Flygteknik 2010 Oct 19MIDCAS – Sense and Avoid for UAS Bengt-Göran Sundqvist, Saab AB
Mid Air Collisions 2006 South America LUNA (UAV) over Afghanistan Combat training 2002 Überlingen
Layers of Protection Against Mid Air Collisions • Strategic Conflict Management • Procedures • Regulations • Flight plans 1. • Separation Provision • Responsibility of ATC or the pilot depending on airspace class and flight rules • “Don't scare others!” 2. • Collision Avoidance • This ultimate responsibility for avoiding collisions lies always with the pilot. • Mainly performed by the pilots ability to “See & Avoid”, i.e. the pilots eyes and his/hers ability to perform the correct decision and correct action. • “Don't scrape paint” 3.
MIDCAS mission statement “The MIDCAS mission is to demonstrate the baseline of solutions for the UAS Midair Collision Avoidance Function (including separation), acceptable by the manned aviation community and being compatible with UAS operations in non-segregated airspace by 2015” MIDCAS scope has been defined with due consideration for the views of the main European stakeholders: EASA, EUROCONTROL, EUROCAE WG73 • The project is designed with focus on 3 main tracks with high level of interaction and interdependency: • Progress on Standards for S&A • Design of a generic S&A function to be tested in simulations • Design of a S&A demonstrator to be tested in flight
Scope of MIDCAS • The generic system shall support all UAS: • with maximum take off weight > 150 kg • in all airspace classes • operated according to Instrument Flight Rules • during both Visual and Instrument Metrological Conditions • during Day and Night operation • during enroute flight (include different types of manoeuvring such as climb, descent and turning). • above 3000ft with respect to ground • in congestion expected according to operation • operated according to the rules of the air
MIDCAS Contract • EDA is the contracting agency for the MIDCAS project on behalf of the contributing members (CM) • Sweden (lead) • Germany • France • Italy • Spain • Approx 50 MEuro budget – biggest single project within EDA • Contract signed at the Paris Air Show, June 2009 with an industry consortium of 13 partners from the 5 nations • Project started 15 Sep 2009 and will run for 4 years European Defense Agency
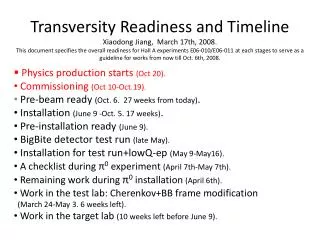
4 1 2 1 3 2 1 2 MIDCAS Schedule 2012 2013 2010 2011 MIDCAS Demo CER PDR CDR Management Project management and Technical coordination Standardization support Systems Eng. Concept SE Functional SE Assessment SE Demonstrator SE Increment 1 Functional Design Increment 2 Increment 3 Sensor H/W H/W Design Increment 4a Incr 4b System H/W 1 (manned) System H/W 2 (UAV) Sim development Tests in simulators Tests in manned a/c Sensor Flight Tests Functional Flight Tests Tests in UAS Non-segr Flight S&A Flights Workshop with Stakeholders Formal Verification & AW Testing Management Systems Eng. Func. Design incl S/W H/W Design Implementation Design Verification Modification & Integration Flight Test Simulator Test
Normal System Engineering • Customer states: USER needs • Concept of operation (CONOPS) and High level requirements (HLR) are derived • CONOPS + HLR + Standards are used to derive lower levelrequirements and allocate these to design. • Validation of requirements are performed in each step • Verification of implementation at each integration step against req on that level. • Validating final product (design) against USER needs. • Cash in. • But MIDCAS is not that easy! We lack • Well defined USER and thus user needs • Standard for S&A for UAS. • A product (the demonstrator will not fulfill the standard)
Questions and current studies • A major aspect is quantification of qualitatively expressed “requirements” • ICAO Annex2 “Rules of the air”: • 'pass well clear’ • ‘head-on’ • ‘Compatible levels of safety as manned aviation’ • ‘Good airmanship' • ‘TCAS compatibility’ • ‘Nuisance free’ • ‘Increased workload’
Sensor de-risking flight tests • Purpose is to gather data to be used for: • development of image processing algorithms • sensor models for simulation • Two different types of sensors have been integrated into the nose of a CASA C-212 test aircraft • two visible band (EO) cameras • one infrared (IR) camera IR EO
Key issues • Standardization support • Stakeholder workshops • Acceptance of requirements and solutions • Feasibility • Systems Engineering • Functional Design • Validation of Requirement and concept • Demonstrator design • Produceability • Safety • Planned UAV flight in non-segregated airspace including discussions of the safety case with the Civil Aviation Authorities • Incremental approach with feedback from simulations, and test to the concept, requirement and design.
Questions! Manned and unmanned demonstrators CASA 212 Alenia Sky-Y