Visibility-based Probabilistic Roadmaps in Advanced Robotics
This presentation on advanced robotics by Behdad Soleimani outlines the definitions, algorithm, analysis, experiments, pros, and cons of visibility-based probabilistic roadmaps. It covers topics like local method, roadmap, visibility domain, and free-space coverage. The analysis focuses on roadmap size, termination criteria, and side effects. Experiments with robot arms and rolling bridges are discussed, highlighting the advantages and shortcomings of the approach. References to related research are included. Presentation date: March 9, 2009.

Visibility-based Probabilistic Roadmaps in Advanced Robotics
E N D
Presentation Transcript
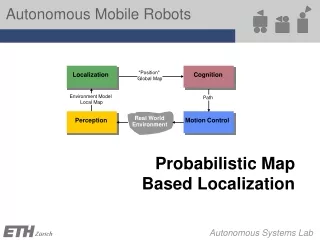
Visibility-based Probabilistic Roadmaps Presentation for the course : Advanced Robotics Behdad Soleimani 9 March 2009
Outline • Overview • Definitions • Algorithm • Analysis • Experiments • Pros and Cons • Experimental Comparison : Narrow Passages • Adaptive and Relaxed VPRM
Overview Basic PRM Visibility-based PRM
Definitions • Local Method (admissibility) • Roadmap (adjacency) • Visibility Domain (reachability) • Free-space Coverage (ε-goodness) • Visibility Roadmap (undirected set of guards and connection nodes)
Algorithm Essence: cover the CSfree with guards, and connect them using connection nodes
Analysis • Size of visibility roadmaps : bounded • Termination Criterion, Probabilistic Coverage • Side-effects : due to random generation • Visibility & Connectivity
Experiments (1) Robot Arm (6DOF) Local Method : Linear Roadmap’s size : 26 CPU time : (for solving the first problem) 370 sec
Experiments (1 cont.) Robot Arm (6DOF) Local Method : Linear Roadmap’s size : 26 CPU time : (for solving the first problem) 370 sec
Experiments (2) Rolling Bridge (4DOF) Local Method : Manhattan Roadmap’s size : 25 CPU time : (for solving the first problem) 2 sec
Experiments (2 cont.) Rolling Bridge (4DOF) Local Method : Manhattan Roadmap’s size : 25 CPU time : (for solving the first problem) 2 sec
Pros and Cons • Small Size • Termination condition • Two main steps of the PRM-based algorithms : • Sampling the CSfree and generating new nodes (more expensive!) • Testing and connecting the node to the existing roadmap (far less expensive!) Visib-PRM : O(n) , Basic-PRM : O(n2) n: no. of random collision-free configurations • Two main shortcomings: “unlucky” sampling, narrow passages Note : Visibility-based PRM is NOT a method for solving Narrow Passage Problem, although it tends to perform better in those situations than the Basic PRM.
Experimental Comparison : Narrow Passages (2) • Workspace dimensions : • 200 * 200 * 150 • Width of rectangular passage : • 50 • Moving object : • 5 blocks • length 50 , cross-section 10 • Values averaged over 10 runs • Same set of configurations for both algorithm
Adaptive & Relaxed VPRM (1) RELAXED (x) : Relaxed Acceptance Test of VPRM
Adaptive & Relaxed VPRM (2) Modified Visibility-based PRM
References • T. Siméon, J.-P. Laumond., and C. Nissoux, “Visibility based probabilistic roadmaps for motion planning.” Advanced Robotics Journal, 14(6), 2000. • J.-P. Laumond, T. Siméon , “Notes on visibility roadmaps and path planning” 4th Workshop on Algorithmic Foundations of Robotics (WAFR), Hannover, USA (2000). • T-M Bu, Z-J Li, and Z Sun, “Adaptive and Relaxed Visibility-based PRM”, In proc. of IEEE International Conference on Robotics and Biomimetics (ROBIO), pp 174-179, 2005
THANK YOU During this presentation, approximately 500 children died… two-thirds of them were preventable.