Navigating Tight Spaces Efficiently with Probabilistic Roadmaps: The Small-Step Retraction Method
160 likes | 204 Vues
Explore research on efficient navigation through tight passages using innovative strategies and techniques in robotics planning with Probabilistic Roadmaps (PRM) by Mitul Saha and Jean-Claude Latombe. Learn about the Small-Step Retraction Method for overcoming obstacles in planning paths through narrow passages. Discover how this approach improves planning efficiency and addresses common challenges faced in complex geometric scenarios.

Navigating Tight Spaces Efficiently with Probabilistic Roadmaps: The Small-Step Retraction Method
E N D
Presentation Transcript
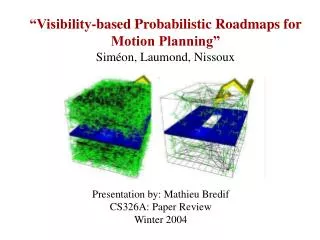
Finding “Narrow Passages” withProbabilistic Roadmaps: The Small-Step Retraction Method Mitul Saha and Jean-Claude Latombe Research supported by NSF, ABB and GM Artificial Intelligence Lab Stanford University
Roadmap components local path milestone Probabilistic Roadmaps (PRM) goal configuration start configuration free-space c-obstacle Configuration-space components [Kavraki, Svetska, Latombe, Overmars, 1996]
PRM planners solve complicated problems Complex geometries: obstacles: 43530 polygons Robot: 4053 polygons High dimensional
low density of free samples high density of free samples Main Issue: “Narrow Passages” narrow passage free samples colliding local path colliding samples The efficiency of PRM planners drops dramatically in spaces with narrow passages
Main Issue: “Narrow Passages” • Problems with “narrow passages” are commonly encountered
? Main Issue: “Narrow Passages” • Proposed strategies: • Filtering strategies, e.g., Gaussian sampling [Boor et al. ‘99] and bridge test [Hsu et al. ‘03] rely heavily on rejection sampling • Retraction strategies, e.g., [Wilmart et al. ‘99][Lien et al. ‘03] waste time moving many configurations out of collision
difficult narrow passages easy narrow passages Motivating Observation planning time decreasing width of the narrow passage
Small-Step Retraction Method start Fattening goal widened passage c-obstacle fattened free space free space Roadmap construction and repair (2 & 3) (1) • Slightly fatten the robot’s free space • Construct a roadmap in fattened free space • Repair the roadmap into original free space
start goal c-obstacle free space Small-Step Retraction Method Roadmap construction and repair Fattening widened passage fattened free space • Free space can be “indirectly” fattened by • reducing the scale of the geometries (usually of • the robot) in the 3D workcell with respect to • their medial axis • -This can be pushed into the pre-processing • phase
start goal widened passage c-obstacle fattened free space free space Small-Step Retraction Method Roadmap construction and repair Fattening start Repair during construction Pessimist Strategy Optimist Strategy Repair after construction goal fattened free space
start • Optimist may fail due to • “false passages” but Pessimist • is probabilistically complete • Hence Optimist is less reliable, • but much faster due to its • lazy strategy goal widened passage c-obstacle fattened free space free space Small-Step Retraction Method Roadmap construction and repair Fattening start Repair during construction Pessimist Strategy Optimist Strategy Repair after construction goal fattened free space
start goal widened passage c-obstacle fattened free space free space Small-Step Retraction Method Roadmap construction and repair Fattening start Pessimist Strategy Repair during construction Integrated planner: 1. Try Optimist for N time. 2. If Optimist fails, then run Pessimist Optimist Strategy Repair after construction goal fattened free space
Fattening “preserves” topology/ connectivity of the free space Fattening “alters” the topology/ connectivity of the free space (h) A recent PRM planner Our planner Quantitative Results (c) (a) (b) Alpha 1.1 (g) Alpha 1.0 (f) (d) (e) Upto 3 orders of magnitude improvement in the planning time was observed
Quantitative Results • Test environments “without” narrow passages • SSRP and SBL have similar performance (i) (j)
Conclusion • SSRP is very efficient at finding narrow passages and still works well when there is none • The main drawback is that there is an additional pre-computation step
Finding “Narrow Passages” withProbabilistic Roadmaps: The Small-Step Retraction Method


![Force [N/m]](https://cdn2.slideserve.com/4557374/slide1-dt.jpg)