Download
1 / 23
240 likes | 397 Vues
Zero Touch Photonic Networks: Implementation of GMPLS for Hybrid Optical Networking. Gert Grammel PLM Crossconnect Product Group Sept 15, 2009. A. B. C. D. A. B. C. D. The challenge Zero Touch Photonics. GMPLS CONTROL PLANE. PLANNING&DESIGN. HIGH SURVIVABILITY.

E N D
Zero Touch Photonic Networks:Implementation of GMPLS for Hybrid Optical Networking Gert Grammel PLM Crossconnect Product Group Sept 15, 2009
A B C D A B C D The challenge Zero Touch Photonics GMPLS CONTROL PLANE PLANNING&DESIGN HIGH SURVIVABILITY AUTOMATIC PROVISIONING REAL TIME RESTORATION 10/40/100 G LAMBDAS OPTICAL PATH FEASIBILITY
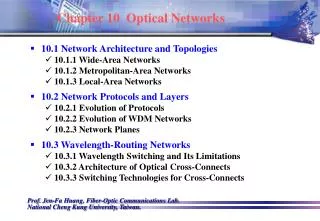
GMPLS Path computationPath feasibility • When the OSNR and/or NLE thresholds are crossed, the physical path is considered unfeasible • Transponder type (bit rate, modulation format, FEC type…): • Transponder types have different OSNR, NLE and PMD penalties/tolerances • Optical route impairment accumulation (wavelength independent): • OSNR margin: remaining margin before reaching the OSNR Threshold • NLE margin: remaining margin before reaching the Nonlinear Threshold • PMD: accumulated PMD (also influencing the OSNR margin, by imposing a penalty) Path Section/OMS1 Section/OMS2 Section/OMS3 Node1 Node2 Node3 Node4 NLE1 OSNRLink1 PMDLink1 NLE2 OSNRLink2 PMDLink2 NLE3 OSNRLink3 PMDLink3
1 Domain considerations
? λGMPLS control plane λGMPLS control plane ODU/OTH 3R 3R Control Plane NetworkingHow to manage growth? λGMPLS control plane ODU/OTH 3R 3R GMPLS / WDM
Optically infeasible λ GMPLS control plane ODU E-NNI λ GMPLS control plane 3R 3R 3R 3R Control Plane Networkingusing E-NNI? ? λE-NNI λGMPLS control plane λGMPLS control plane 3R 3R
3R 3R 3R 3R optically feasible ! Control Plane Networkingusing E-NNI? ODU E-NNI λ GMPLS control plane λ GMPLS control plane 3R 3R 3R 3R CP architecture forcing Transponder duplication to cross domains
Control Plane Networkingusing E-NNI? ODU E-NNI λ GMPLS control plane λ GMPLS control plane λE-NNI 3R 3R 3R 3R 3R 3R How to decide at the source node which E-NNI to use?
Control Plane Networkingusing E-NNI? ODU E-NNI λ GMPLS control plane λ GMPLS control plane λE-NNI 3R 3R 3R 3R E-NNI Network abstraction does not allow to reliably decide which way to use: λ or ODU? 3R 3R How to decide at the source node which E-NNI to use? λ orODU?
3R 3R Control Plane NetworkingIntegrated Control Integrated GMPLS control plane 3R 3R 3R 3R Shared knowledge of optical parameters and 3R resources
2 GMPLS Implementation based on RFC 3945 Generalized Multi-Protocol Label Switching Architecture
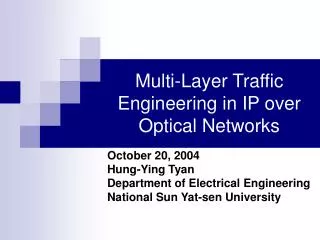
GMPLS Path computationPath restoration (functional scheme) Start Calculate Path Hard constraints: SRLG, opt. feasibility Soft Constraints: Cost, Wavelength Calculate Path Hard constraints: SRLG, opt. feasibility, 3R-Regen Soft Constraints: Cost, Wavelength Route found Route found no yes yes no Establish Path e2e Notify operator
Routing Constraints Hard constraints are: • Shared Risk Link Group: Diversity constraint imposed by Operator • Transponder type (bit rate, modulation format, FEC type…): • Optical Parameters: • Wavelength available • OSNR margin: remaining margin before reaching the OSNR Threshold • NLE margin: remaining margin before reaching the Nonlinear Threshold • PMD: accumulated PMD (also influencing the OSNR margin, by imposing a penalty) Soft constraints are: • cost of link: parameter to prefer/avoid a link configured by the operator GMPLS parameters Optical parameters S T O c
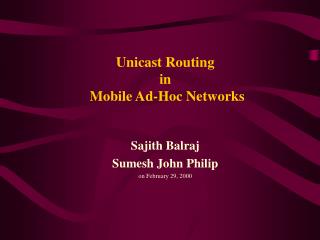
3R site Tail Node Source Node S S S S S S S S S S S S S S S S S S S S S T T T T T T T T T T T T T T T T T T T T T O O O O O O O O O O O O O O O O O O O O O c c c c c c c c c c c c c c c c c c c c c 3R 3R 3R 3R 3R 3R Example Network 3R • Shared Risk Link Group • Transponder type • Optical Parameters: : • cost 1 3 2 4 8 5 9 10 6 7 Routing information: • Link characteristic: OSNR, NLE, PMD, SRLG, cost • Available TRBs: capacity, Modulation, tuning capability • Available Regenerator sites 11 3R
1-3-5-7-11 1-3-5-6-11 1-3-4-6-11 1-2-8-10-6-11 1-2-4-5-6-11 1-2-4-6-11 1-2-8-4-6-11 1-2-3-5-7-11 ............... 3R 3R 3R 3R 3R 3R 1) Apply Unconstraint Dijkstra Algorithm:find all possible ways from Source to destination 3R 1 3 2 4 8 5 9 10 6 7 11 3R
1 3 2 4 8 5 opt.-constraints: 1-3-5-7-11 opt.-constraints: 1-3-5-6-11 opt.-constraints: 1-3-4-6-11 opt.-constraints: 1-2-8-10-6-11 opt.-constraints: 1-2-4-5-6-11 opt.-constraints: 1-2-4-6-11 opt.-constraints: 1-2-8-4-6-11 opt.-constraints: 1-2-3-5-7-11 9 10 6 7 11 2) Apply optical constraints:remove all unfeasible path from the list Path Section/OMS1 Section/OMS2 Section/OMS3 Node1 Node2 Node3 Node4 NLE1 OSNRLink1 PMDLink1 NLE2 OSNRLink2 PMDLink2 NLE3 OSNRLink3 PMDLink3 List Empty NOK NOK NOK NOK NOK NOK NOK NOK
1-3-5 + 5-7-11 1-3-5 + 5-6-11 1-3-4 + 4-6-11 1-2-8 + 8-10-6-11 1-2-4-5 + 5-6-11 1-2-4 + 4-6-11 1-2-8-4 + 4-6-11 1-2-3-5 + 5-7-11 ............... 3R 3R 3R 3R 3R 3R 3) If list was empty: apply again Dijkstra Algorithm:find all possible ways from Source to destination considering intermediate 3R 3R 1 3 2 4 8 5 9 10 6 7 11 3R
4) Apply optical constraints:remove all unfeasible path from the list with regeneration Path Section/OMS1 Section/OMS2 Section/OMS3 Node1 Node2 Node3 Node4 NLE1 OSNRLink1 PMDLink1 NLE2 OSNRLink2 PMDLink2 NLE3 OSNRLink3 PMDLink3 opt.-constraints: 5-7-11 opt.-constraints: 5-6-11 opt.-constraints: 4-6-11 opt.-constraints: 8-10-6-11 opt.-constraints: 5-6-11 opt.-constraints: 4-6-11 opt.-constraints: 4-6-11 opt.-constraints: 5-7-11 OK OK OK NOK OK OK OK OK opt.-constraints: 1-3-5 opt.-constraints: 1-3-5 opt.-constraints: 1-3-4 opt.-constraints: 1-2-8 opt.-constraints: 1-2-4-5 opt.-constraints: 1-2-4 opt.-constraints: 1-2-8-4 opt.-constraints: 1-2-3-5 OK OK OK OK OK OK OK OK
3R 1 3 2 4 8 5 3R 3R 3R 3R 3R 3R 9 10 6 7 11 3R soft constraints hard constraints 5) Optimization: Find path without tuning colors:Prioritize path without re-tuning opt.-constraints: 1-3-5 opt.-constraints: 1-3-5 opt.-constraints: 1-3-4 opt.-constraints: 1-2-8 opt.-constraints: 1-2-4-5 opt.-constraints: 1-2-4 opt.-constraints: 1-2-8-4 opt.-constraints: 1-2-3-5 OK OK OK OK OK OK OK OK c=5 c=5 c=5 c=6 c=5 c=6 c=6 opt.-constraints: 5-7-11 opt.-constraints: 5-6-11 opt.-constraints: 4-6-11 opt.-constraints: 8-10-6-11 opt.-constraints: 5-6-11 opt.-constraints: 4-6-11 opt.-constraints: 4-6-11 opt.-constraints: 5-7-11 OK OK OK NOK OK OK OK OK
Summary • Hybrid optical Networks must deal dynamically with 3R resources and optical parameters thereby integrating 2 layer information in one control plane • Control plane concepts enforcing administrative boundaries are suitable for multi-vendor/multi-domain networks but are not cost efficiently address regeneration issues in single-vendor hybrid optical networks. • Experience in deployed networks confirm that control plane performance is not critical.
Acknowledgements • We acknowledge gratefully that part of this work • has been supported by the German Ministry for • Research and Education (BMBF) under the EUREKA • project “100GET—100Gbit/s Carrier-Grade Ethernet • Transport Technologies” (grant 01BP0720).
Material:What’s going on … • ITG-Fachtagung (Leipzig) May, 4 2009: Implementation of GMPLS for Hybrid Optical Networking Gert Grammel • Sept, 8 2009 [Docs] [txt] [pdf] [WG] [Email] [Diff1] [Diff2] [Nits] Versions: (draft-ietf-ccamp-wavelength-switched-framework) 00010203Network Working Group Y. Lee (ed.) Internet Draft Huawei Intended status: Informational G. Bernstein (ed.) Expires: March 2010 Grotto Networking Wataru Imajuku NTT September 8, 2009 Framework for GMPLS and PCE Control of Wavelength Switched Optical Networks (WSON) draft-ietf-ccamp-rwa-wson-framework-03.txt • Oct, 1 2009 http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=4982668&isnumber=5210716 JOURNAL OF LIGHTWAVE TECHNOLOGY, VOL. 27, NO. 19, OCTOBER 1, 2009; Accounting for Shared Regenerators in GMPLS-Controlled Translucent Optical Networks; Nicola Sambo, Alessio Giorgetti, Filippo Cugini, Nicola Andriolli, Luca Valcarenghi, Member, IEEE, and Piero Castoldi, Member, IEEE
www.alcatel-lucent.com www.alcatel-lucent.com