2. Kinematika
2. Kinematika. Kinematika sa zaoberá klasifikáciou a porovnávaním pohybov bez toho, aby študovala sily, ktoré pohyb spôsobujú. Študuje závislosť pohybov od času. Pohyb pozdĺž priamky – jednorozmerný pohyb. Teleso sa pohybuje len pozdĺž priamej čiary, ktorú môžeme označiť ako napr. os x .

2. Kinematika
E N D
Presentation Transcript
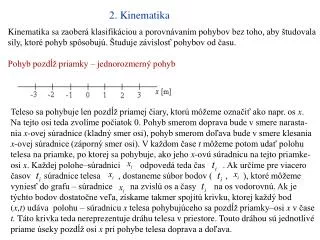
2. Kinematika Kinematika sa zaoberá klasifikáciou a porovnávaním pohybov bez toho, aby študovala sily, ktoré pohyb spôsobujú. Študuje závislosť pohybov od času. Pohyb pozdĺž priamky – jednorozmerný pohyb Teleso sa pohybuje len pozdĺž priamej čiary, ktorú môžeme označiť ako napr. os x. Na tejto osi teda zvolíme počiatok 0. Pohyb smerom doprava bude v smere narasta- nia x-ovej súradnice (kladný smer osi), pohyb smerom doľava bude v smere klesania x-ovej súradnice (záporný smer osi). V každom čase t môžeme potom udať polohu telesa na priamke, po ktorej sa pohybuje, ako jeho x-ovú súradnicu na tejto priamke- osi x. Každej polohe–súradnici odpovedá teda čas . Ak určíme pre viacero časov súradnice telesa , dostaneme súbor bodov ( , ), ktoré môžeme vyniesť do grafu – súradnice na zvislú os a časy na os vodorovnú. Ak je týchto bodov dostatočne veľa, získame takmer spojitú krivku, ktorej každý bod (x,t) udáva polohu – súradnicu x telesa pohybujúceho sa pozdĺž priamky–osi x v čase t. Táto krivka teda nereprezentuje dráhu telesa v priestore. Touto dráhou sú jednotlivé priame úseky pozdĺž osi x pri pohybe telesa doprava a doľava.
Pohyb s konštantnou rýchlosťou Na obrázku je nakreslený graf polohy tele- sa pozdĺž priamky, ktorú sme stotožnili s osou x, verzus t, t.j. každému časovému okamihu t odpovedá poloha – x-ová súrad- nica x. Ako vidíme, týmto grafom je priam- ka. Smernicu tejto priamky definujeme ako podiel (1) kde a sú dva ľubovoľné body na priamke. Smernica priamky teda nezávisí od voľby bodov, pomocou ktorých ju počítame. Naozaj. Na obrázku sú dva rôzne veľké trojuholníky, ktoré sú podobné, t.j. majú rovnaký pomer strán. Potom smernica pomocou nich počítaná musí byť jedna a tá istá. To je aj logické, pretože smernica priamky hovorí o jej strmosti a tá je vždy tá istá nezávisle od toho, ktorý úsek priamky uvažujeme. Môžeme teda zvoliť ľubovoľný počet trojuholníkov pre rôzne dvojice bodov a . Všetky budú podobné, a teda dajú rovnakú smernicu, aj keby sme ich zmenšili na infinitezimálnu veľkosť. Keby sme
tieto infinitezimálne trojuholníky rozmiestnili jeden vedľa druhého pozdĺž priamky, pre každý z nich by sme mali rovnakú, t.j. konštantnú smernicu. Zadefinujme rých- losť ako podiel zmeny polohy telesa a času, ktorý táto zmena trvala. Pod zmenou po- lohy rozumieme dráhu, ktorú pohybujúci sa objekt prešiel od nejakej počiatočnej po- lohy (súradnice) na osi x, xi, v ktorej bol v čase ti , po nejakú konečnú polohu na tejto osi, xk , v ktorej bol v čase tk . T.j. pohybujúci sa objekt prešiel úsek na osi x – dráhu xk - xi-- za čas tk - ti , a jeho rýchlosť je teda daná rovnicou (1), ktorá platí pre ľubovoľné dva, a teda aj infinitezimálne blízke body na priamke. Pri pohybe konštantnou rýchlosťou pre ľubovoľnú prejdenú dráhu a čas, za ktorý bola táto dráha prejdená, t.j. pre ľubovoľné a im odpovedajúce , je podiel prejdenej dráhy a času, ktorý toto trvalo, vždy to isté číslo – táto rýchlosť. Urobiť takýto podiel je však očividne to isté, ako vypočítať smernicu priamky reprezentujú- cej závislosť polohy objektu pohybujúceho sa pozdĺž osi x od času t pre jej ľubovoľ- né dva body , . Jednorozmerný pohyb telesa s konštantnou rýchlosťou je teda reprezentovaný v grafe x verzus t priamkou, ktorej smernica udáva túto rýchlosť.
Priemerná rýchlosť Priemernú rýchlosť definujeme ako po- diel celkovej prejdenej vzdialenosti a času, za ktorý teleso túto vzdialenosť prešlo. Nevieme pritom nič o tom, či a ako sa menila rýchlosť telesa počas tohto času. Na obrázku sú nakreslené dva prík- lady pohybu, pri ktorom prejde teleso celkovú vzdialenosť za čas . V jednom prípade prejde te- leso túto vzdialenosť konštantnou rý- chlosťou (2)
V druhom prípade sa teleso pohybuje v časovom intervale až konštantnou rýchlosťou , a potom v časovom intervale až konštantnou rýchlosťou . Priemerná rýchlosť tohto pohybu je teda daná rovnicou (2), ktorá nič nehovorí o tom, ako sa menila rýchlosť pohybu počas celého časového intervalu , v ktorom bol pohyb realizovaný. Okamžitá rýchlosť Na obrázku je zakreslená krivka, ktorá v každom svojom bode udáva polohu telesa x pri jeho jednorozmernom pohybe pozdĺž osi x v príslušnom čase t. Na tejto Krivke sme zvolili dva body – a . Priemerná rýchlosť telesa pre časový interval je potom čo je, ako je zrejmé, smernica priamky určenej bodmi a . Keď te- raz budeme zmenšovať čas , bude sa táto priamka čoraz viac blížiť k dotyčnici ku nakreslenej krivke x verzus t, až v limite, kedy bude nekonečne blízko k ča-
su , bude táto priamka dotyčnicou ku našej krivke v bode . Smernicu tejto do- tyčnice môžeme vypočítať známym spôsobom, t.j. zvolíme na tejto priamke dva bo- dy a použijeme vzorec (1). Tieto body môžu byť aj nekonečne blízko, t.j. smernica do- tyčnice môže byť daná podielom infinitezimálnej zmeny vzdialenosti a infinitezimál- nej zmeny času, čo je definícia derivácie polohy x podľa času t a táto derivácia je rov- ná okamžitej rýchlosti, t.j. rýchlosti, ktorú má teleso v danom časovom okamihu t. Okamžitá rýchlosť telesa pri jeho jednorozmernom pohybe pozdĺž osi x v danom časovom okamihu t je teda rovná smernici dotyčnicev bode t ku grafu x verzus t udávajúceho v každom čase t polohu telesa, t.j. jeho súradnicu x na osi x. To je záro- veň derivácia polohy telesa, t.j. funkcie podľa času vyčíslená v danom časovom okamihu t. Matematicky môžeme tieto tvrdenia zapísať takto (4) kde je časový okamih, v ktorom okamžitú rýchlosť určujeme. Ako vidíme na obrázku z predchádzajúceho slidu, sklon dotyčnite ku krivke x verzus t sa postupne s meniacim sa časom mení, a teda mení sa aj hodnota okamžitej rých- losti jednorozmerného pohybu reprezentovaného touto krivkou.
Priemerné a okamžité zrýchlenie Rýchlosť sme definovali ako podiel zmeny polohy telesa a veľkosti časového inter- valu, počas ktorého k tejto zmene došlo. Vychádzali sme pritom zo závislosti polohy x telesa od času. Zrýchlenie definujeme ako podiel zmeny rýchlosti telesa, ktorá na- stane počas daného časového intervalu, a tohto časového intervalu. Budeme teda vychádzať z krivky verzus t. Nech v čase je rýchlosť telesa a v nejakom neskoršom čase má teleso rýchlosť . Potom priemerné zrýchlenie, ktoré teleso získa počas tohto časového intervalu, je (5) Podobne ako pri priemernej rýchlosti rovnica (5) nehovorí nič o tom, ako a či sa zrýchlenie telesa menilo počas časového intervalu , . Preto určujeme okam- žité zrýchlenie, ktoré má teleso v nejakom časovom okamihu t pri jeho jednorozmer- nom pohybe ako deriváciu jeho rýchlosti podľa času vyčíslenú v tomto časovom oka- mihu, t.j. je to smernica dotyčnice ku krivke verzus t v bode t odpovedajúcom to- muto okamihu. V analógii so (4) môžeme teda napísať definíciu okamžitého zrýchle- nia jednorozmerného pohybu v časovom okamihu takto (6)
Na hornom obrázku je vykres- lená závislosť polohy telesa pri jeho jednorozmernom po- hybe pozdĺž osi x od času. Na základe tejto závislosti a faktu, že okamžitá rýchlosť v neja- kom časovom okamihu t je rovná smernici dotyčnice ku grafu x verzus t v bode t, môžeme zostrojiť graf závis- losti rýchlosti telesa od času, ktorý je vyobrazený na dolnom obrázku: V časovom intervale 0 až 1 s sa teleso nehýbe, t.j. jeho polo- ha sa nemení. To znamená, že v tomto časovom úseku je grafom závislosti x od t príslušný úsek horizontálnej osi, t.j. úsečka s nulovou smerni- cou. Preto grafom závislosti od t v tomto časovom úseku je časť priamky , t.j. rýchlosť telesa v intervale 0 až 1 s je naozaj nulová.
V časovom úseku 1 s až 3 s už je teleso v pohybe, pretože jeho vzdialenosť od po- čiatku osi x sa s narastajúcim časom zväčšuje. Závislosť x verzus t v tomto úseku vyjadruje krivka, ktorej strmosť dotyčnice, t.j. smernica dotyčnice, s narastajúcim ča- som narastá a je kladná. To je vyjadrené aj na dolnom grafe nárastom rýchlosti v intervale 1 s až 3 s, pričom hodnoty rýchlosti sú kladné. Ako vidíme, rýchlosť naras- tá lineárne s časom, t.j. predpokladali sme, že závislosť x od t je úmerná , preto- že derivácia je úmerná t (rýchlosť je derivácia x podľa času). V časovom úseku 3 s až 8 s narastá vzdialenosť x lineárne s časom. To znamená, že v tomto úseku má graf x verzus t vo všetkých svojich bodoch rovnakú smernicu, ktorá je kladná. Rých- losť je teda konštantná a rovná Napokon v časovom intervale 8 s až 9 s x-ová súradnica telesa ďalej narastá, ale tak, že smernica dotyčnice ku grafu x verzus t v tomto časovom úseku klesá, aj keď jej hodnota je kladná. To znamená, že rýchlosť telesa klesá (teleso spomaľuje), aj keď sa stále pohybuje v kladnom smere osi x. Opäť predpokladáme, že pri tomto pohybe x je úmerné , takže je úmerné t, čiže rýchlosť klesá lineárne s ča- som. Napokon pre čas väčší ako 9 s sa poloha telesa ďalej nemení, t.j. graf závislosti x od t je priamka rovnobežná s horizontálnou osou. Smernica tejto priamky je nula, a teda rýchlosť pre s je nulová.
Na hornom obrázku je vykreslená závislosť rýchlosti od času, ktorá odpovedá závislosti polohy telesa od času pri jeho jednorozmernom pohybe zobrazenej na slide 7. Na základe toho, že zrýchlenie v časo- vom okamihu t je rovné smernici dotyčnice ku grafu verzus t v tomto okamihu, môžeme nakresliť závislosť zrýchlenia od času pre tento pohyb, čo je obsahom dolné- ho grafu. V časovom intervale 0 až 1 s je rýchlosť nulová, t.j. graf verzus t je úsek horizontálnej osi, ktorý má nulovú smernicu, takže zrých- lenie v tomto časovom intervale je tiež nulové. V intervale 1 s až 3 s narastá rýchlosť lineárne s časom, t.j. smernica dotyčnice ku grafu verzus t v tomto časovom inter- vale je rovnaká pre všetky jeho body a je kladná. To znamená, že zrýchlenie je kon-
štantné a kladné, t.j. orientované v kladnom smere osi x (teleso zrýchľuje v smere na- rastania x) a je rovné V čase 3 s až 8 s je rýchlosť konštantná, t.j. graf verzus t je priamka rovnobež- ná s horizontálnou osou, čiže s nulovou smernicou, takže zrýchlenie v tomto časovom intervale je nulové. V intervale 8 s až 9 s teleso spomaľuje, a to lineárne s časom, takže graf verzus t je priamka so zápornou smernicou. Odpovedajúce zrýchlenie bude teda záporné, t.j. orientované v zápornom smere osi x (v smere klesania x) a bu- de rovné Napokon pre časy s sa teleso už nepohybuje, t.j. konšt., takže smer- nica dotyčnice ku grafu verzus t pre tieto časy je nulová, a teda je nulové aj zrýchlenie.
Na tomto obrázku je trochu náročnejší príklad toho, ako možno odvodiť závislosť rýchlosti od času na základe známej závislosti polohy od času, a závislosť zrýchlenia od času na základe známej závislosti rýchlosti od času. Zaoberajme sa teda najskôr hornými dvoma grafmi. V úseku 0,a sa poloha telesa nemení, t.j. grafom x verzus t je priamka totožná s horizontálnou osou, a teda s nulovou smernicou, takže rýchlosť je nulová. V úseku a,c sa teleso pohybuje tak, že narastá jeho vzdialenosť od počiatku osi x. Smernica dotyč- nice ku grafu x verzus t je kladná a s narastaním času sa zväčšuje až po svoju maximálnu hodno- tu v bode c. Rýchlosť je teda kladná, t.j. orientovaná v kladnom smere osi x, s časom narastá a v bode c dosiahne svoje maxi- mum. Úseku c,e stále odpovedá pohyb, pri ktorom vzdialenosť od počiatku osi x naras- tá. Smernica dotyčnice ku grafu x verzus t je kladná, ale jej veľkosť klesá až na nulu, ktorú dosiahne v bode e. Rýchlosť teda klesá, ale je stále kladná, t.j. orientovaná v klad- nom smere osi x. Teleso v úseku c,e teda spomaľuje, až v bode e dosiahne nulovú rých- losť. V tomto bode zastane a začne sa pohybovať opačným smerom, t.j. v zápornom
smere osi x, takže jeho vzdialenosť od počiatku osi x sa bude zmenšovať. Toto je vyjadrené tým, že smernica dotyčnice ku grafu x verzus t v úseku e,f je záporná a čo do veľkosti stúpa. Rýchlosť je teda záporná, t.j. orientovaná v zá- pornom smere osi x a jej absolútna hodnota narastá, až v bode f dosiahne svoje maxi- mum. V úseku f,g smernica dotyčnice ku grafu x verzus t je stále záporná, ale čo do veľkosti klesá, až v bode g je nulová. To znamená, že teleso sa stále pohybuje v zá- pornom smere osi x, t.j. stále sa zmenšuje jeho vzdialenosť od počiatku osi x, po- zdĺž ktorej sa pohybuje, ale spomaľuje, až sa zastaví a opäť sa začne pohybovať na o- pačnú stranu, t.j. v kladnom smere osi x. Rýchlosť telesa bude teda opäť kladná a v úseku g,i bude narastať, lebo narastá kladná hodnota smernice dotyčnice ku grafu x verzus t, až kým nedosiahne maximum v bode i. Potom sa opäť zmenšuje hodnota smernice dotyčnice ku grafu x verzus t, aj keď je kladná. To znamená, že rýchlosť telesa klesá, ale jeho pohyb je stále orientovaný v kladnom smere osi x. Uvažujme teraz druhý a tretí graf na predchádzajúcom slide, t.j. odôvodnime, ako sa mení zrýchlenie telesa s časom, na základe závislosti rýchlosti od času. V úseku 0,a je rýchlosť nulová, t.j. graf verzus t v tomto úseku je priamka totožná s horizon- tálnou osou, a teda s nulovou smernicou. Tomu potom odpovedá nulové zrýchlenie. V úseku a,b rýchlosť stúpa, pričom smernica dotyčnice ku grafu x verzus t je kladná a zväčšuje sa, až v bode b dosiahne svoje maximum. Teleso sa teda pohybuje v klad- nom smere osi x so stále väčším zrýchlením, ktoré v bode b dosiahne maximum. V úseku b,c rýchlosť stále stúpa a stále je kladná, t.j. teleso sa stále pohybuje v klad-
nom smere osi x. V bode b je rýchlosť maximálna. Smernica dotyčnice ku grafu verzus t je tiež kladná, ale sa zmenšuje, t.j. teleso stále zrýchľuje, ale s čoraz menším zrýchlením, až v bode c je zrýchlenie nulové. V úseku c,d je rýchlosť kladná, t.j. tele- so sa stále pohybuje v kladnom smere osi x, ale klesá. Smernica dotyčnice ku grafu verzus t je záporná a jej absolútna hodnota sa zväčšuje, až v bode d dosiahne ma- ximálnu hodnotu. Zrýchlenie telesa je teda orientované v zápornom smere osi x, tele- so spomaľuje so stále väčším “spomalením” a v bode d bude spomalenie maximálne. V úseku d,e je rýchlosť stále kladná, t.j. teleso sa stále pohybuje v kladnom smere osi x, až v bode e sa teleso zastaví a začne sa pohybovať opačným smerom. Smernica do- tyčnice ku grafu verzus t je v tomto úseku záponá a v absolútnej hodnote sa zmen- šuje, t.j. teleso stále spomaľuje, aj keď so stále menším zrýchlením. V úseku e,f rýchlosť je záporná a v absolútnej hodnote stúpa. To znamená, že teleso sa pohybuje v zápornom smere osi x a zrýchľuje. Zrýchlenie je tiež orientované v zá- pornom smere osi x a jeho veľkosť sa zmenšuje, keďže smernica dotyčnice ku grafu verzus t je záporná a v absolútnej hodnote sa zmenšuje. V úseku f,g je rýchlosť stále záporná a jej absolútna hodnota klesá, t.j. teleso sa stále pohybuje v zápornom smere osi x a spomaľuje. Smernica dotyčnice ku grafu verzus t je kladná a zväčšuje sa. To znamená, že zrýchlenie je kladné, t.j. orientova- né v kladnom smere osi x a jeho veľkosť stúpa. V bode g teleso opäť zastane a začne sa pohybovať v kladnom smere osi x. Smernica dotyčnice ku grafu verzus t je kladná a stále sa zväčšuje, až dosiahne maximum
v bode h. Zrýchlenie je teda stále orientované v kladnom smere osi x a zväčšuje sa až po maximum v bode h. Od tohto bodu teleso ďalej bude zrýchľovať, ale so stále men- ším zrýchlením. Rýchlosť telesa teda stúpa, pohyb je orientovaný v kladnom smere osi x. V bode i rýchlosť dosiahne maximum a zrýchlenie nulovú hodnotu. Od tohto bodu rýchlosť klesá, ale stále je kladná, t.j. teleso sa stále pohybuje v kladnom smere osi x. Smernica dotyčnice ku grafu verzus t od bodu i je záporná a v absolútnej hodnote sa zmenšuje. To znamená, že teleso spomaľuje, a teda pohybuje sa so zápor- ným zrýchlením, t.j. zrýchlenie je orientované v zápornom smere osi x, a jeho veľkosť narastá.
Dráha a rýchlosť priamočiareho pohybu Pohyb s konštantnou rýchlosťou (t.j. s nulovým zrýchlením) Aby sme odvodili vzorec opisujúci dráhu priamočiareho pohybu s konštantnou rých- losťou, vyjdeme z definície okamžitej rýchlosti ako derivácie polohy podľa času (7) Obe strany rovnice (7) vynásobíme elementárnou zmenou času dt a obe strany takto vzniknutej rovnice integrujeme, t.j. prevedieme neurčitý integrál o- boch strán (8) Keďže konšt., môžeme ju vybrať pred integrál. Dostaneme tak na ľavej stra- ne integrál z 1 podľa t a na pravej strane integrál z 1 podľa x. Teraz použijeme známy neurčitý integrál (9)
pre prípad, kedy . Integráciou oboch strán (8) teda získame rovnicu (10) kde a sú integračné konštanty odpovedajúce príslušným integráciám. Tieto určíme z počiatočných podmienok. Budeme predpokladať, že na začiatku merania ča- su, t.j. v čase sa teleso nachádzalo v polohe na osi x-ovej (pozdĺž ktorej sa pohybuje). Dosaďme teda dp rovnice (10) za čas t nulu a namiesto x počiatočnú po- lohu . Dostaneme tak čo po dosadení do (10) dáva hľadané vyjadrenie pre polohu telesa pohybujúceho sa priamočiaro, t.j. pozdĺž osi x, a konštantnou rýchlosťou v závislosti od času (11) Pohyb s konštantným zrýchlením (t.j. rovnomerne zrýchlený pohyb) Aby sme získali vyjadrenie pre rýchlosť takéhoto pohybu, vyjdeme z definície okam- žitého zrýchlenia ako derivácie okamžitej rýchlosti podľa času (12)
Keďže rovnice (7) a (12) sú rovnakého typu, budeme pri riešení (12) postupovať ana- logicky ako pri riešení (7). Vynásobíme teda obe strany rovnice (12) elementárnou zmenou času dt, čím získame rovnicu ktorej obe strany integrujeme – ľavú podľa integračnej premennej t a pravú podľa in- tegračnej premennej . Opäť, keďže neudávame hranice integrovania, ide o neurči- té integrály. Ďalej, keďže konšt., môžeme ho vybrať pred integrál na ľavej strane. Vzniknutá rovnica teda je Na ľavej strane máme integrál z 1 podľa času a na pravej integrál z 1 podľa rýchlosti. Použijeme teda znova vzorec (9) pre , kde y reprezentuje buď čas t alebo rých- losť . Výsledok integrovania teda je kde a sú integračné konštanty príslušných integrácií. Tieto opäť určíme z po- čiatočných podmienok pohybu, t.j. budeme predpokladať, že v čase bola rýchlosť pohybu . Keď dosadíme tieto podmienky do horeuvedenej rovnice, dostaneme výraz
a teda hľadaná rovnica vyjadrujúca závislosť rýchlosti telesa pri jeho priamočiarom pohybe s konštantným zrýchlením od času má tvar (13) Aby sme získali vyjadrenie pre polohu telesa pohybujúceho sa pozdĺž osi x s konštan- tným zrýchlením, vyjdeme z definície (7), do ktorej dosadíme za rýchlosť vzťah (13). Po vynásobení oboch strán takto získanej rovnice zmenou času dt dostaneme Opäť zoberieme neurčitý integrál z oboch strán poslednej rovnice, t.j. Využijúc známe pravidlá integrovania dostávame ďalej (14) Všetky integrály vystupujúce v rovnici (14) nájdeme s použitím vzorca (9), kde pre- menná y reprezentuje buď t alebo x. Výsledkom integrácie (14) teda je
Integračné konštanty a vystupujúce v poslednej rovnici určíme z rovnakých počiatočných podmienok, ako v prípade pohybu s konštantnou rýchlosťou, t.j. položí- me v čase polohu telesa . Po dosadení týchto podmienok do poslednej rovnice dostaneme a teda hľadaná rovnica vyjadrujúca závislosť polohy na osi x pri rovnomerne zrých- lenom pohybe telesa od času je takáto (15)
Pohyb v 3-rozmernom prietore Polohový vektor Je to vektor, ktorý udáva polohu telesa vzhľadom na nejaký referenčný bod, ktorým najčastejšie býva počiatok súradnicovej sústavy. Potom začiatok polohového vektora je v počiatku súradnicovej sústavy a koniec v ťažisku telesa. V pravouhlej súradnico- vej sústave je polohový vektor daný vyjadrením (16) kde sú jeho vektorové zložky a x, y, z sú jeho skalárne zložky, t.j. súrad- nice konca vektora v pravouhlom súradnicovom systéme. Na prvom obrázku na nasledujúcom slide je vyobrazený príklad konkrétneho polohového vektora, ktorého súradnice sú v trojrozmernom priestore udané v metroch. Na druhom obrázku na nasledujúcom slide sú vykreslené tri vektory. Vektor u- dáva polohu telesa v čase a vektor udáva polohu telesa v nejakom neskor- šom čase , takže platí . Vektor je vektor posunutia z bodu udaného polohovým vektorom do bodu špecifikovaného polohovým vektorom . Gréc- ky symbol sa často vzťahuje na rozdiel dvoch veličín. To platí aj v tomto prípa- de: Keďže podľa pravidiel skladania vektorov je vektor súčtom vektorov a , platí (17)
Posunutie je teda rozdielom konečnej a počiatočnej polohy. Dosaďme teraz do rovni- ce (17) vyjadrenia pre polohové vektory a na základe (16): (18)
kde veličiny sú pravouhlými priemetmi vektora posunutia do súradnicových osí, t.j. posunutia v smere súradnicových osí. Teraz už môžeme definovať priemernú rýchlosť v 3-roz- mernom priestore Priemerná rýchlosť (19) Ako vidíme, pri pohybe v trojrozmernom priestore je rýchlosť vektor, pretože je vektor a vektor delený číslom, v tomto prípade , je tiež vektor. V troch rozme- roch už teda nevystačíme len s udaním veľkosti rýchlosti a jej orientácie, ako je to pri jednorozmernom pohybe. Musíme udať 3 zložky rýchlosti, ktorých veľkosti a zna- mienka jednoznačne určujú veľkosť, smer a orientáciu rýchlosti v 3-rozmernom priestore. Priemerná rýchlosť zadefinovaná v (19) nehovorí nič o tom, ako sa mení s časom po- loha objektu v časovom intervale . Aby sme teda informáciu o pohybe telesa spresnili, budeme neustále zmenšovať časové intervaly , až v limite nekonečne malého prírastku bude aj posunutie nekonečne malé, t.j. stane sa infinitezimálnym posunutím . Postupnosti koncov polohových vektorov
odpovedajúcich nekonečne blízkym časom budú potom predstavovať dráhu telesa v priestore a vektory infinitezimálnych posunutí budú v každom bode dráhy telesa, ktorý je daný koncom príslušného polohového vektora, dotyčnicou k tejto dráhe v tomto bode. Naše úvahy ilustruje aj obrázok. Vidíme, že čím je menší časový interval , t.j. čím sú k sebe bližšie polohové vektory a , tým viac sa smer vektora blíži k smeru dotyčnice ku dráhe telesa.
Okamžitá rýchlosť Už vieme, že rýchlosť definujeme ako podiel zmeny polohy a veľkosti časového in- tervalu, počas ktorého k tejto zmene došlo. V 3-rozmernom prípade je zmena polohy reprezentovaná vektorom , resp. , čo sme aj využili pri definícii priemer- nej rýchlosti (19). Teraz na základe toho, čo sme povedali na predchádzajúcich dvoch slidoch, môžeme zadefinovať okamžitú rýchlosť objektu v 3-rozmernom priestore ako vektor (20) Vektor rýchlosti odpovedajúci určitému časovému okamihu teda definujeme ako deriváciu polohového vektora vyčíslenú v tomto okamihu. Vzhľadom na to, že rých- losť je podiel vektora a čísla dt, bude jej smer taký istý ako smer , t.j. v 3- rozmernom priestore má okamžitá rýchlosť v každom bode dráhy telesa smer dotyč- nice k tejto dráhe. Keď dosadíme do poslednej rovnosti v (20) vyjadrenie (16), dostaneme (21) V rovnici (21) sme teda derivovali polohový vektor podľa času. To znamená, že sme derivovali každý z jeho troch členov, pričom jednotkové vektory
sú konštantné vektory, t.j. nemenia sa s časom, takže ich derivácia je rovná nule. Zlož- ky vektora rýchlosti pozdĺž súradnicových osí x, y, z, t.j. jeho pravouhlé priemety do súradnicových osí,sú teda rovné deriváciám podľa času súradníc udávajúcich polohu telesa v 3-rozmernom priestore. Priemerné a okamžité zrýchlenie Vieme, že zrýchlenie definujeme ako po- diel zmeny rýchlosti a časového intervalu odpovedajúceho tejto zmene. Keďže v 3- rozmernom priestore je rýchlosť vektor, bude aj rozdiel rýchlostí a , kto- ré reprezentujú pohybový stav telesa v ča- sových okamihoch a , pričom , vektor. Ako teda ilustruje aj ob- rázok, je zmena rýchlosti, odpovedajúca časovým okamihom a vektor Priemerné zrýchlenie, odpovedajúce tejto zmene rýchlosti je potom
(22) Priemerné zrýchlenie definované rovnicou (22) je teda vektor, pretože je vektor, ktorý delíme len číslom . Podobne, ako v prípade priemernej rýchlosti, priemerné zrýchlenie nehovorí nič o tom, ako sa zrýchlenie telesa mení v čase medzi okamihmi a . Túto informáciu nám dáva okamžité zrýchlenie, ktoré definujeme vzťahom (23) Zrýchlenie je teda podielom vektora reprezentujúceho infinitezimálnu zmenu vektora rýchlosti a jemu príslušnej infinitezimálnej zmeny času, t.j. zrýchlenie telesa v nejakom časovom okamihu je rovné derivácii vektora jeho rýchlosti podľa času vy- číslenej v tomto okamihu. Ako je evidentné z (22), resp. (23), je smer totožný so smerom , resp. . Keby sme teda zaviedli pravouhlú súradnicovú sústavu, na osi ktorej by sme vynášali zložky vektora rýchlosti, potom “polohovým” vektorom v tejto súradnicovej sústave by bol vektor . Konce vektorov príslušných nekonečne blízkym časovým okamihom, t.j. vektorom okamžitej rýchlosti, by v tej- to súradnicovej sústave tvorili krivku reprezentujúcu rýchlosť telesa v 3-rozmernom priestore. Vektor okamžitého zrýchlenia v ľubovoľnom časovom okamihu, odpove- dajúcemu určitej okamžitej rýchlosti, by potom mal smer dotyčnice ku tejto krivke
v bode reprezentujúcom tento časový okamih, t.j. danú okamžitú rýchlosť. Využime teraz v poslednej rovnosti v (23) vyjadrenia (21). Tak získame rovnicu u- dávajúcu okamžité zrýchlenie takto (24)
Pohyb v tiažovom poli Zeme blízko jej povrchu Keď hodíme baseballovú loptu, bude sa pohybovať v rovine. Ide teda o dvojrozmerný pohyb. Ak nebudeme uvažovať odpor vzduchu, tak v horizontálnom smere nepôsobí na loptu nijaká sila, a teda lopta má v tomto smere nulové zrýchlenie. To znamená, že horizontálna zložka rýchlosti sa počas celého pohybu nebude meniť a bude rovná horizontálnej zložke rýchlosti, s ktorou sme loptu hodili na začiatku. Pri vertikálnej zložke pohybu lopty je situácia iná, pretože vo zvislom smere pôsobí na loptu tiažové pole Zeme a to jej udeľuje vertikálne zrýchlenie orientované nadol. Preto sa verti- kálna zložka rýchlosti lopty bude počas jej pohybu meniť. Pri 2-rozmernom pohybe v tiažovom poli Zeme nie vysoko nad jej povrchom (aby sme mohli tiažové zrýchlenie považovať za konštantné) sú horizontálna a vertikálna zložka pohybu navzájom nezávislé, a preto môžeme tento pohyb študovať ako dva nezávislé jednorozmerné pohyby. Zvoľme teda 2-rozmernú kartézsku súradnicovú sústavu tak, že os x je totožná s po- vrchom Zeme s kladným smerom v smere pohybu a kladný smer osi y je v smere zvislom nahor. Keďže horizontálna zložka rýchlosti je počas pohybu konštantná, vyjadríme závislosť x-ovej súradnice telesa od času na základe rovnice (11). Pre ho- rizontálnu zložku pohybu teda máme vyjadrenia (25)
Vo vertikálnom smere je telesu udeľované konštantné zrýchlenie orientované v smere zvislom nadol, t.j. v zápornom smere osi y. To zna- mená, že toto zrýchlenie je záporné. Použijúc teda rovnice (13) a (15), bude tento pohyb popísaný rovnicami (26) v ktorých konštanta g je kladné číslo rovné veľkosti tiažového zrýchlenia na povrchu Zeme (približne 9.81 ms-2). Rovnice (25) a (26) popisujú pohyb po parabole, ktorý znázorňuje aj obrázok. Hovo- rí sa mu aj šikmý vrh. Tieto rovnice však za určitých podmienok špecifikujú aj jed- noduchšie pohyby. Rovnice pre tieto pohyby dostaneme, keď tieto podmienky dosa- díme do rovníc (25) a (26) :
1. Voľný pád Voľne, t.j. bez udania počiatočnej rýchlosti, pustíme teleso z výšky nad povr- chom zeme. Keˇže teleso padá vertikálne, t.j. pozdĺž osi y, jeho x-ová súradnica sa počas pádu nemení a rýchlosť má len y-ovú zložku, ktorá je záporná, pretože je orien- tovaná nadol, t.j. v zápornom smere osi y. 2. Vrh zvislý nadol Ide opäť o vertikálny pohyb, takže horizontálna zložka rýchlosti je nulová a x-ová súradnica telesa je konštantná. Teleso hodíme zvislo nadol z výšky nad zem- ským povrchom, t.j. udelíme mu počiatočnú rýchlosť v smere zvislom a zápornom vzhľadom na os y. Preto rýchlosť daná len jej y-ovou zložkou bude opäť počas ce- lého pohybu záporná.
3. Vrh zvislý nahor Teleso hodíme z ľubovoľnej výšky nad povrchom zeme v smere zvislom nahor. Opäť teda horizontálna zložka rýchlosti je nulová a x-ová súradnica pohybu je kon- štantná. Rýchlosť teda má len y-ovú zložku a počas stúpania telesa je kladná, pretože je orientovaná v kladnom smere osi y. 4. Vodorovný vrh V ľubovoľnej výške nad zemským povrchom udelíme telesu rýchlosť vo vodo- rovnom smere. Počas pohybu sa teda bude meniť ako x-ová, tak aj y-ová súradnica telesa. V horizontálnom smere bude mať teleso konštantnú nenulovú rýchlosť rovnú x-ovej zložke počiatočnej rýchlosti. Zložka rýchlosti vo vertikálnom smere bude po- čas celého pohybu záporná, lebo bude orientovaná nadol, t.j. v zápornom smere osi y.
Rotačný pohyb okolo pevnej osi – pohyb po kružnici Doteraz sme sa v tejto kapitole zaoberali translačnými, t.j. posuvnými, pohybmi. Pri translačnom pohybe každý bod telesa vykoná za ten istý čas rovnakú dráhu. Pri rotač- nom pohybe okolo pevnej osi sa každý bod telesa otočí za ten istý čas o rovnaký uhol. Môžeme teda skonštatovať, že dráhe, resp. zmene polohy telesa, pri translačnom po- hybe korešponduje pri rotačnom pohybe okolo pevnej osi uhol. V analógii s translač- ným pohybom, ktorý je charakterizovaný rýchlosťou a zrýchlením, zavádzame teda pri rotačnom pohybe uhlovú rýchlosť a uhlové zrýchlenie. Prvý obrázok znázorňuje translačný pohyb – všetky body telesa vykonajú za rovnaký čas rovnaké drá- hy. Pri pohybe, ktorý zná- zorňuje druhý obrázok, to už tak nie je – translačný pohyb je skombinovaný s rotáciou okolo ťažiska tele- sa, t.j. každú novú polohu telesa dosiahneme tak, že ho najskôr posunieme translačným pohybom, a potom vyko-
náme rotáciu okolo jeho ťažiska o príslušný uhol. Pri rotačnom pohybe okolo pevnej osi každý bod telesa vykonáva dráhu po kružnici s polomerom r, ktorý predstavuje kolmú vzdialenosť bodu telesa od osi otáčania. Polohu telesa rotujúceho okolo pevnej osi udáva referenčná čiara, ktorá je kolmá na os rotácie a v telese je fixovaná. Poloha telesa je potom daná uhlom, ktorý zviera referenčná čiara napr. s kladným smerom osi x. Ako vieme, uhol v radiánoch je definovaný vzťahom (27) Uhlová rýchlosť Definujme uhlovú rýchlosť ako podiel zmeny uhla a časového intervalu, za ktorý k tej- to zmene dôjde pri rotačnom pohybe. Potom môžeme analogicky s translačným jed- norozmerným pohybom definovať priemernú uhlovú rýchlosť telesa rotujúceho oko- lo pevnej osi takto
(28) kde je uhol, ktorý zviera referenčná čiara s kladným smerom osi x v čase a je uhol, ktorý zviera referenčná čiara s kladným smerom osi x v nejakom neskoršom čase , pričom časový interval má konečnú dĺžku. Podobne ako pri jednorozmernom translačnom pohybe zadefinujeme aj okamžitú uh- lovú rýchlosť vzťahom (29) Okamžitá uhlová rýchlosť každého bodu telesa rotujúceho okolo pevnej, t.j. uhlová rýchlosť v časovom okamihu t, je teda deriváciou uhla podľa času vyčíslenou v tomto okamihu. Keby sme pre daný pohyb nakreslili graf závislosti uhla zvieraného referen- čnou čiarou s kladným smerom osi x, od času, bola by okamžitá uhlová rýchlosť v ľu- bovoľnom čase t rovná smernici dotyčnice k tomuto grafu v bode t. Vo všeobecnosti uhlová rýchlosť je vektor, ktorý leží v osi otáčania a má smer na tú stranu od tejto osi, z ktorej sa otáčanie telesa javí proti chodu hodinových ručičiek. Ak uvažujeme otáčanie okolo pevnej osi, t.j. osi, ktorej poloha je v priestore fixovaná, či-
že sa nemení s časom, nemení sa ani smer vektora uhlovej rýchlosti. Pokiaľ sa zmení v tomto prípade veľkosť rýchlosti otáčania, t.j. veľkosť vektora , bude vektor reprezentujúci túto zmenu tiež ležať v osi otáčania a jeho orientácia bude závisieť od veľkostí počiatočnej uhlovej rýchlosti a konečnej uhlovej rýchlosti . V skutočnosti sa však môžeme stretnúť aj so zložitejšími pohybmi, kedy sa pri rotácii telesa okolo osi mení aj smer tejto osi v priestore. Vtedy vektor stále bude ležať v osi otáčania a jeho smer sa teda bude meniť. To znamená, že vektor v tomto prípade už v osi otáčania ležať nebude.
Uhlové zrýchlenie Uhlové zrýchlenie definujeme ako podiel zmeny uhlovej rýchlosti a veľkosti časového intervalu, za ktorý k tejto zmene došlo. Analogicky so zrýchlením pri jednorozmer- nom translačnom pohybe definujeme priemerné uhlové zrýchlenie telesa rotujúceho okolo pevnej osi takto (30) kde je uhlová rýchlosť v čase a je uhlová rýchlosť v čase . Podobne okamžité uhlové zrýchlenie telesa pri rotačnom pohybe okolo pevnej osi definujeme (31) Uhlové zrýchlenie telesa rotujúceho okolo pevnej osi v ľubovoľnom časovom okami- je teda dané deriváciou jeho uhlovej rýchlosti podľa času vyčíslenou v tomto okamihu. Je to tiež smernica dotyčnice ku grafu verzus t v bode korešpondujúcom tomuto okamihu. Uhlové zrýchlenie je podobne ako uhlová rýchlosť vektor. Ak ide o rotáciu telesa okolo pevnej osi, leží tento vektor v osi rotácie, pretože aj vektor (konečnej, či infinitezimálnej veľkosti) leží v osi rotácie. Ako však vidíme z obrázku na predchádzajúcom slide, keď sa orientácia osi rotácie v priestore mení, toto už neplatí.
Teraz nie je ťažké vidieť, že medzi jednorozmerným translačným pohybom a rotá- ciou telesa okolo pevnej osi platia tieto korešpondencie jednorozmerný translačný pohyb rotácia okolo pevnej osi uhol ... dráha ... x uhlová rýchlosť ... rýchlosť ... uhlové zrýchlenie ... zrýchlenie ... a Preto v úplne rovnako, ako sme odvodili vzťah (11) pre jednorozmerný translačný pohyb s konštantnou rýchlosťou a vzťahy (13) a (15) pre jednorozmerný translačný pohyb s konštantným zrýchlením, by sme odvodili nasledovné vzťahy platiace pre rotáciu telesa okolo pevnej osi: konšt. konšt.
Vzťahy medzi lineárnymi a uhlovými veličinami V ďalšom výklade nájdeme vzťahy medzi lineárnymi veličinami a uhlovými veliči- nami. Pod lineárnymi veličinami budeme rozumieť rýchlosť a zrýchlenie, ako sme ich definovali pre translačný pohyb, uhlové veličiny budú uhlová rýchlosť a uhlové zrýchlenie. Zvoľme v telese rotujúcom okolo pevnej osi bod, ktorého kolmá vzdiale- nosť od osi rotácie je r. Ak začneme merať čas v momente, keď tento bod prechádza osou x, tak za nejaký čas t bude tento bod v polohe, kedy zviera uhol s kladným smerom osi x, čomu bude odpovedať dĺžka kružnicového oblúka s. Potom na základe (27) bodom prejdená vzdialenosť po kružnici bude Derivovaním poslednej rovnice podľa času využijúc, že pre daný bod konšt. , tak dostávame (32) Rovnica (32) dáva do vzťahu veľkosť rýchlosti definovanej ako podiel prejdenej vzdialenosti a času, za ktorý táto vzdialenosť bola prejdená, bodu konajúceho pohyb po kružnici a jeho uhlovú rýchlosť . Pritom rýchlosť je vektor, keďže ide o dvojrozmerný pohyb, a má smer dotyčnice ku kružnici, pretože vektor elementu drá- hy má smer dotyčnice ku kružnici. Vektor elementu dráhy teda hrá tú istú úlohu, ako vektor v definícii (20).
Ak rovnicu (32) zderivujeme podľa času, získame ďalší vzťah (33) Veličina vystupujúca v rovnici (33) sa nazýva tangenciálne zrýchlenie. Je to časť zrýchlenia a , ktoré je tiež vektor, keďže ide o 2-rozmerný po- hyb, ktorá má smer dotyčnice ku kružnici, predstavujúcej dráhu pohybu ľubovoľné- ho bodu telesa rotujúceho okolo pevnej osi. Orientácia a okamžitej rýchlosti je pritom rovnaká. Ako vidíme z (33), je definované ako derivácia veľkosti rýchlosti. Je teda nenulové, keď sa mení veľkosť rýchlosti, t.j. dĺžka jej vektora. Ak teda teleso rotuje okolo pevnej osi s konštantnou uhlovou rých- losťou, t.j. každý jeho bod so svojou rýchlosťou konštantnej veľkosti, (keďže vektor rýchlosti má smer dotyčnice ku kruhovej dráhe, jeho smer sa pri pohybe po kružnici neustále mení, t.j. vektor rýchlosti pri pohybe po kružnici nie je konštantný, aj keď jeho veľkosť konštantná byť môže), je táto časť zrýchlenia a nulová a toto zrýchlenie má len zložku radiálnu ale- bo normálovú , ktorá má smer do stredu kruhovej dráhy a ktorá vyjadruje zmenu smeru pohybu. Podobne, ako vektor rýchlosti, ani vektor zrýchlenia nie je teda vo všeobecnosti pri rotácii telesa okolo pevnej osi kon- štantný a na základe definícií (22) a (23) má smer zmeny vektora rýchlosti.
Zrýchlenie tangenciálne a normálové (dostredivé) Uvažujme pohyb po kruhovej dráhe, napr. bodu telesa rotujúceho okolo pevnej osi. Nech sú jednotkové vektory so smerom ako na obrázku. Vektor je o- rientovaný na tú stranu od roviny, v ktorej dráha leží, z ktorej sa pohyb javí proti chodu hodinových ručičiek. Vektor je jednotkový vektor so smerom a orientá- ciou vektora okamžitej rýchlosti, ktorý, ako už vieme, má v každom bode dráhy smer jej dotyčnice v tomto bode. Na základe definície (23) a vlastností vektorov mô- žeme písať pre zrýchlenie bodu rotujúceho telesa (34)
Tu poznamenajme, že sme derivovali aj vektor , pretože hoci má konštantnú dĺžku, nemá pri pohybe po kružnici konštantný smer, a teda to nie je konštantný vektor na rozdiel od konštantných jednotkových vektorov , ktoré sme definovali v kar- tézskom súradnicovom systéme. Rovnica (34) hovorí, že vektor je súčtom dvoch vektorov. Prvý vektor má smer a orientáciu vektora okamžitej rýchlosti, t.j. má smer dotyčnice k dráhe, a predstavuje teda už známe tangenciálne zrýchlenie. Druhý vektor v poslednej rovnici predstavuje normálové zrýchlenie, pretože má smer vektora , a ten je kolmý na tú- to dotyčnicu, t.j. má smer do stredu kruhovej dráhy. Tu podotknime, že vektor je rozdielom dvoch vektorov, ktorá majú síce rovnakú dĺžku (jednotkovú), ale ktorých smery sa líšia o infinitezimálny uhol. Preto je kolmý na dotyčnicu k dráhe, t.j. na vektor . Upravme teraz druhý výraz v (34), t.j. výraz udávajúci normálové zrýchlenie (35) Keďže vektor je kolmý na , je kolmý na , t.j. smeruje do stredu kruhovej dráhy pohybujúceho sa bodu v telese, aj vektor . Pri úprave horeuvedené- ho výrazu ďalej využijeme
Túto rovnicu môžeme diferencovať majúc na pamäti, že r a sú konštantné veliči- ny. Mení sa len vektor , a to jeho smer. Dostaneme teda Z poslednej rovnice je zrejmé, že Po dosadení posledného vyjadrenia do (35) teda máme pre normálové zrýchlenie vzorec kde znamienko “-” vyjadruje, že má smer opačný ako , t.j. do stredu kruho- vej dráhy. Rovnicu (34) teda môžeme napísať v tvare
Úvahy, ktoré sme tu práve uviedli, možno rozšíriť aj na pohyb po ľubovoľnej krivke. Každému bodu krivky môžeme priradiť elementárny úsek , ktorý má svoj stred krivosti. Týmto stredom krivosti je stred kružnice, ktorá má taký polomer a je tak u- miestnená, aby úsek s ňou splýval, keď túto kružnicu ním preložíme. Potom v každom bode krivky rýchlosť a tangenciálne zrýchlenie budú mať smer dotyčnice ku takto zostrojenej kružnici a normálové zrýchlenie bude na túto dotyčnicu kolmé.