Download
1 / 25
250 likes | 424 Vues
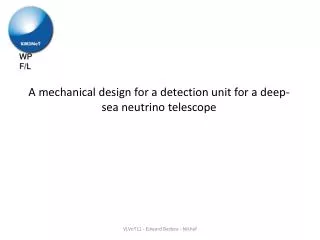
A mechanical design for a detection unit for a deep-sea neutrino telescope. First concept DOMBAR. Fits in ISO container. First design. Bar Frame. Rope Storage. Rope & Cable Storage. Mechanical Cable Connection. 6 m. Optical Module. Mechanical Interface. 2 DOM + 1 BAR = 1 DOMBAR

E N D
A mechanical design for a detection unit for a deep-sea neutrino telescope VLVnT11 - Edward Berbee - Nikhef
First concept DOMBAR Fits in ISO container VLVnT11 - Edward Berbee - Nikhef
First design Bar Frame Rope Storage Rope & Cable Storage Mechanical Cable Connection 6 m Optical Module Mechanical Interface 2 DOM + 1 BAR = 1 DOMBAR 20 DOMBARS = DOMTOWER VLVnT11 - Edward Berbee - Nikhef
Floating problem due to flatness Because of the “flat” top-view the floor tends to float in horizontal direction. VLVnT11 - Edward Berbee - Nikhef
Other design ideas; abandoned “turning flaps” “hosted hood” “tuning drum” VLVnT11 - Edward Berbee - Nikhef
VEOC management Data VEOC Mechanical cable (Dyneema rope) 2 double reels for unwinding the ropes VLVnT11 - Edward Berbee - Nikhef
Some design considerations; -2 ropes wound around braked cable reels (and so under tension) to perform the unfurling controlled. -Buoyancy on each floor, above the center of gravity to insure horizontal unfurling of the floors. -Keep the unfurling speed low for better control (but not to low for drifting away due to current). -Keep the DU-package compact for easy handling and transportation. -The rope- and cable unfurling as well as all other items should not happen uncontrolled (without tension) at any moment. VLVnT11 - Edward Berbee - Nikhef
Slightly rotated bar structures for narrow stacking - complicated cable and rope management! VLVnT11 - Edward Berbee - Nikhef
DOMBAR unfurling constrains; choice made Unfurling method -In all methods; tension in ropes absolutely necessary. Unwinding synchronized necessary? All in once, then from the bottom off the package. -Very high unfurling speed at the beginning. One by one, from the bottom up, -Unfurling speed more continuous. Buoyancy on each storey. Buoyancy on each floor. Yes; - Mechanical construction to separate one by one absolutely necessary. No; -Less need for mechanical construction to separate one by one. No; - Mechanical construction to separate one by one absolutely necessary. Yes; -Less need for mechanical construction to separate one by one. VLVnT11 - Edward Berbee - Nikhef
Possible design Package; L x W x H 5800 x 2380 x 2050 mm Fits a “pallet wide” or “flat rack” container Floors clamped on vertical tubes, pulled off during unfurling, all under discussion. “flat rack” container VLVnT11 - Edward Berbee - Nikhef
Storey with yellow vertical optical cables (VEOC) and two double cable reels at the end (internally braked) Storey buoyancy, syntactic foam; approx. 450 N - 0,1M3 VLVnT11 - Edward Berbee - Nikhef
Verifying stable dynamic behavior VLVnT11 - Edward Berbee - Nikhef
-20 bar structures. -Top buoy. -3 distance frames. -Baseframe with clamping tubes. -2 concrete “Stelcon” plates. -2 separator racks. VLVnT11 - Edward Berbee - Nikhef
Possible unfurling -Buoy is released. -Buoy pulls of first storey. -Buoy and first storey will pull off the second storey etc. -Released storey will make an approximately 45 degree turn while floating up. -Tensioned ropes, pull tension approximately 100 N each rope for better control during unfurling. -Each storey clamped with spring tensioned clamp on 5 vertical tubes, friction on these tubes approx. 500 N. VLVnT11 - Edward Berbee - Nikhef
Some details Hinged support plates for stabilizing the end of bar structures. One of the two rollers from the bottom storey to connect to the base frame. The three lower storeys are without optical modules. VLVnT11 - Edward Berbee - Nikhef
Lower part of the DU Lower active Bar Distance frames, the lower one with running wheels For rotating of the DU. Scaled picture Not scaled picture Concrete deadweight, (or steel) captured in aluminum profile. VLVnT11 - Edward Berbee - Nikhef
Unfurling of a DU scale model from the seabed up VLVnT11 - Edward Berbee - Nikhef
1:50 model area Real scale area VLVnT11 - Edward Berbee - Nikhef
Drag coefficients of importance for the DU For spheres the drag coefficient Cd= 0.5, For the Dom we take (some extra for the interface); In both horizontal and vertical direction Cd = 0.7 Drag of the cables and ropes; Cd = 1.2 Drag coefficient for the aluminum tubes, circular rod, In both horizontal and vertical direction Cd = 1.2 Storey buoyancy; estimated for flow from the top; Cd = 0.9 estimated for flow from the side; Cd = 0.5 Top-buoy; estimated for flow from the top; Cd = 0.8 Estimated for flow from the side; Cd = 0.4 VLVnT11 - Edward Berbee - Nikhef
uh = 30 cm/s Hydro dynamic behavior Used formula; Where: rho = the density of seawater = 1028 kg/m3 v = the speed in m/s Cd = the drag coefficient (dimensionless) A = surface area in m2 Characteristics used: Rope OD (4x) 4 mm VEOC OD (2x) 6.35 mm Top buoyancy 1000 N Bar buoyancy 450 N Total buoyancy 10000 N Anchor 3670 kg (concrete, weight in air) Anchor 2450 kg (steel weight in air) Total transport weight 7420 / 6200 kg Total weight in sea 1120 kg Calculated drift 165 m @ v = 0.30 m/s u VLVnT11 - Edward Berbee - Nikhef
Influences on the amount of drag Some examples compared to the situation of the previous slide (drift 165 m); Rope OD (4x) 5 mm (instead of 4 mm) Drift 179 m @ v = 0.30 m/s VEOC OD (2x) 10 mm (instead of 6.35 mm) Drift 190 m @ v = 0.30 m/s Top buoyancy 7000 N (instead of 1000N) Bar buoyancy 150 N (instead of 500N) Total buoyancy 10000 N (still) Drift 130 m @ v = 0.30 m/s VLVnT11 - Edward Berbee - Nikhef
Hydro dynamic behavior In vertical direction (during unfurling) (450 N local buoyancy) Calculated speed of 1000 N top-buoy at start; 1.46 m/s Calculated speed first storey with top-buoy; 1.13 m/s Calculated speed first two floors with top-buoy; 1.03 m/s Calculated speed at the last floor; 0.85 m/s In vertical direction with a top buoy of 7000 N instead of 1000 N; (150 N local buoyancy) Calculated (vertical) speed top-buoy at start; 2.48 m/s Calculated speed first storey with top-buoy; 2.04 m/s Calculated speed first two floors with top-buoy; 1.79 m/s Calculated speed at the last floor; 0.89 m/s VLVnT11 - Edward Berbee - Nikhef
Verifying vertical drag calculation on scale-model Calculated; 0,060m/s at 0,001 N buoyancy measured speed 0,065 m/s VLVnT11 - Edward Berbee - Nikhef
Summary; Calculation for the deviation of the top relative to the bottom at 0.30 m/s current; (possible to improve by a bigger top-buoy) 165 m Calculated speed of 1000 N top-buoy at start; 1.46 m/s Calculated speed first storey with top-buoy; 1.13 m/s Calculated speed at the last floor; 0.85 m/s VLVnT11 - Edward Berbee - Nikhef