Download
1 / 29
290 likes | 452 Vues
Gait recognition under non-standard circumstances. Kjetil Holien. Disposition. Research questions Introduction Gait as a biometric feature Analysis Experiment setup Results Conclusion Questions. 1/27. Research questions. Main research questions:

E N D
Gait recognition under non-standard circumstances Kjetil Holien
Disposition • Research questions • Introduction • Gait as a biometric feature • Analysis • Experiment setup • Results • Conclusion • Questions 1/27
Research questions • Main research questions: • To what extent is it possible to recognize a person under different circumstances? • Do the different circumstances have any common features? • Sub research question: • Do people walk in the same way given the same circumstances? 2/27
Introduction • Authentication can occur in three ways: • Something you know, password or PIN code. • Something you has, key or smartcard. • Something you are, biometrics. • Biometrics are divided into: • Physiological: properties that normally do not change, fingerprints and iris. • Behavioral: properties that are learned, such as signature and gait. 3/27
Gait as a biometric feature Three main approaches: • Machine Vision based. • Floor Sensor based. • Wearable Sensor based (our approach). 4/27
Machine Vision • Obtained from the distance • Image/video processing • Unobtrusive • Surveillance and forensic applications 5/27
Floor Sensor • Sensors on the floor • Ground reaction forces/ heel-to-toe ratio • Unobtrusive • Identification 6/27
Wearable sensors • Sensor attached to the body • Measure acceleration • Signal processing • Unobtrusive • Authentication 7/27
Gait analysis • Sensor records acceleration in three directions: • X (horizontal) • Y (vertical) • Z (lateral) • Average cycle method: • Detect cycles within a walk. • A cycle consist of a doublestep (left+right). • Average the detected cycles (e.g. mean, median). • Compute distance between average cycles. • Euclidian, Manhattan, DTW, derivatitve 9/27
Average cycle method • Compute resultant vector: • Time interpolation: every 1/100th sec • Noise reduction: Weighted Moving Average • Step detection • Average cycle creation 10/27
Step detection (1/2) 13/27
Step detection (2/2) • Consist of several sub-phases: • Estimate cycle length • Indicate amplitude details • Detect starting location • Detect rest of the steps 14/27
Creation of average cycle • Pre-processing methods: • Normalize to 100 samples • Adjust acceleration • Align maximum points • Normalize amplitude • Skip irregular cycles • Create average cycle: • Mean • Median • Trimmed Mean • Dynamic Time Warping 15/27
Cycles overlaid 16/27
Average cycle, mean 17/27
Experiment setup • Main experiment: • 60 participants, two sessions of collection. • 1st session: 6 normal walks, 8 fast and 8 slow. • 2nd session: 6 normal walks, 8 circle walks (4 left and 4 right). • Sub-experiment: • 5 participants walking 40 sessions 2 months. • Each session consisted of 4 walks in the morning and 4 walks in the evening. Sensor was always at the left hip. 18/27
Results • Best results when: • Normalize to 100 samples. • Adjust acceleration. • Aligned maximum points. • Removed irregular cycles. • Mean and median average cycle. • Dynamic Time Warping as distance metric. 19/27
Normal walking 20/27
Other circumstances 21/27
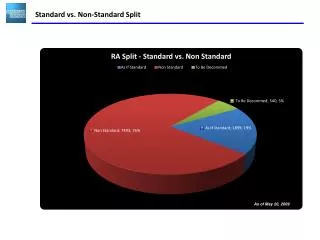
All circumstances • Normal vs other circumstances • EER between 15-30% • Multi-template • 1 template for each circumstance, the others as input • EER = 5.05% 22/27
Common features • Cycle length: • Normal: [95..125], average of 109 samples • Fast: [80..110], average of 96 samples • Slow: [110..180], average of 137 samples • Circle same as normal • Amplitudes related to cycle length 23/27
Long-term experiment (1/3) • Morning vs morning / evening vs evening • Compare sessions at different days intervals 24/27
Long-term experiment (2/3) • Linear regression to compute a linear function (y = a + bx). • Use hypothesis testing: • H0: b = 0 (stable walk) • H1: b > 0 (more unstable walk) • Results: • Rejected H0 for 90% distance increases as time passes by. 25/27
Long-term experiment (3/3) • Morning vs evening (same day) and evening vs the consecutive morning • No difference in the average scores. • Between 30% and 70% increase compared with 1 day interval scores. 26/27
Conclusion • Extremely good EER when comparing the circumstance with itself. • Different circumstances seems to be distinct hard to transform X to normal. • Good results when using a multi-template solution. • Gait seems to be unstable to some extent need a dynamic template. 27/27
Questions? Thanks for listening!