Traffic Estimation with Space-Based Data
Traffic Estimation with Space-Based Data. Mark R. McCord NCRST-F The Ohio State University Workshop on Satellite Based Traffic Measurement Berlin, Germany 9-10 September 2002. Satellite Imagery for Vehicle Identification. High Resolution Required Cars 1m - 2m panchromatic

Traffic Estimation with Space-Based Data
E N D
Presentation Transcript
Traffic Estimation withSpace-Based Data Mark R. McCord NCRST-F The Ohio State University Workshop on Satellite Based Traffic Measurement Berlin, Germany 9-10 September 2002
Satellite Imagery forVehicle Identification High Resolution Required Cars 1m - 2m panchromatic Trucks 4m panchromatic
High Resolution => Low orbits => Limited temporal sampling (dynamic traffic) => Long time scale, geographically extensive applications => Traffic Monitoring Average Annual Daily Traffic (AADT) Vehicle Kilometers Traveled (VKT)
Improved AADT and VKTEstimation from High-Resolution Satellite Imagery Acknowledgments P. Goel, Z. Jiang, B. Coifman, Y. Yang,C. Merry, Past Students
Average Annual Daily TrafficVehicle Kilometers Traveled AADT: Traffic on a highway segment AADTsΣ=1,365 V24s, / 365 V24s, 24-hour volume, segment s, day VKT: Travel over the network (avg daily) VKT = Σs=1,S Lengths * AADTs
Estimating AADT on System (Permanent) Automatic Traffic Recorders V24s, , = 1, 2, …, 365, s Spatr ~3% segments equipped with PATRs => Calculate AADTs s Spatr => Estimate temporal variability (“expansion factors”) e.g., EF() = EFMD[m(),d()], m() = 1,2, …, 12 d() = 1, 2, …, 7
Estimating AADT on System (cont.) Moveable ATRs (Coverage Counts) V24s, , V24s, +1, {1, 2, …, 364},sSmatr ~33% segments per year => Estimate AADTs s Smatr AADTests = f[V24s, , V24s, +1, EF(), EF(+1)] e.g. AADTests = [V24s, /EF()+V24s,+1/EF(+1)]/2
Estimating AADT on System (cont.) Unsampled Segments in Year, Suns (S=Spatr Smatr Suns) AADTs Suns = f[AADTs’,s’ SpatrSmatr], s Suns e.g. AADTs Suns = Average[AADTs’,s’ SpatrSmatr] AADTs Suns = f[AADTs sampled in previous year, network growth factors]
AccuracySampling, Estimation MethodologyCostLarge Labor and Equipment Expenses
Satellite Imagery Potential Added Data Off-the-Road Spatial Perspective Access of Remote Areas Difficulty Unfamiliar (Density Based) Potential Error (“Short Interval” Observation)
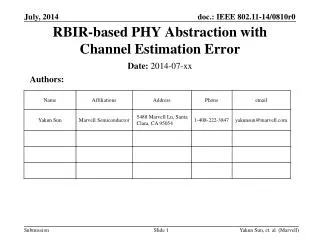
Original Image Binary Image
Flowest(x,t+t) = Density(x+x,t)*Velocity(x+x,t) Flowest(x,t+t) [vph] t short (3-15 minutes) V24,ests, = f[Flowest(x,t+t; s,), EFh(h(t))] e.g., V24,ests, = 24*Flowest(x,t+t; s,) / EFh(h(t)) EFh: hourly expansion factor
V24,ests, = f[Flowest(x,t+t; s,), EFh(h(t))] AADTimgs = f[V24,ests, , EFMD[m(),d()] ] EFMD: seasonal factor (month-of-year, day-of-week)
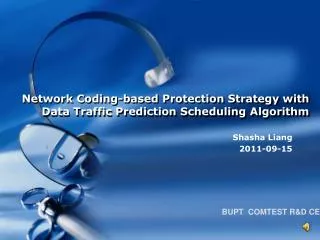
Relative Error(AADT Image-based – AADTTrue) / AADTTrueAADTTrue AADTGround-based
Relative Errors, RE N = 18 N(RE > 0) = 12 N(RE < 0) = 6 Sample Mean = 0.03 Sample St. Dev. = 0.15 RELATIVELY UNBIASED
Relative Errors, RE Sample St. Dev. (w. mean = 0) = 0.15 Maximum RE = 0.34 Lower RE with better AADTGr-based Equiv. Count Interval: 0.6 – 12.6 mins SURPRISING, PROMISING PERFORMANCE
Computer Simulation Inputs • Traffic Patterns • AADT distribution, Link Lengths, EFM, EFD - Ground-Based Sampling •% Permanent ATR’s (PATR’s) • % Coverage Counts (MATR’s) • Satellite-Based Sampling* • Variability/Error/Random Terms** Outputs - AADT and VKT (VMT) Estimation Error •Ground-Based Data Only • Satellite- and Ground-Based Combination
Satellite-Based Sampling*Physical Relations FCD[lat1,lat2] = 2(1-Fnpgt)*NPIX*RES*NORB *L[lat1,lat2;i, NORB])10-3)/EAR[lat1, lat2] (5) NORB = 8,681,665.8/ (R+H)1.5 [orbits/day] (9) H > 200 km => NORB < 16.3 [orbits/day] (10) H = (FL/WPI)(RES)(103) [km] (12) NORB>8,681,665/((FL/WPI)max(RES(103)+6371)1.5 [orb/day] (14) Vsg = 0.4633(NORB) [km/sec] (17) DBR = 3.706(NORB)(NPIX)(10-3)/(RES*COMP) [Mbits/sec] (18) (NPIX)( NORB) < 269.8(RES)(DBR*COMP)max (20)
Satellite-Based Sampling*Maximal Coverage (P1) Max: Z1=NORB*NPIX*L[lat1,lat2;i,NORB] NORB,NPIX,i s.t. 90 < i < 180 8,681,665.8/((FL/WPI)max RES(103)+6371)1.5 < NORB < 16.3 0 < NPIX < NPIXmax (NPIX)(NORB) < 269.8(RES)(DBR*COMP)max
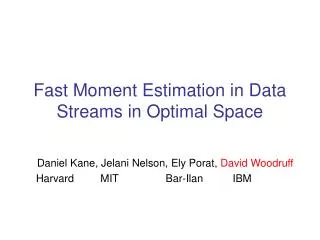
Satellite-Based Sampling*: Daily Coverage vs. Resolution and Inclination Angle
Variability/Error/Random Terms** • Ground-based sample: (gr) V24(gr)s, = AADTs*EFMM()-1 *EFDD()-1 * exp((gr) - (gr)2/2), (gr) ~ N(0, (gr)) (gr): Daily deviation from deterministic model • Satellite-based sample: (sat) V24(sat)s, = AADTs*EFMM()-1 *EFDD()-1 * exp((sat) - (sat)2/2), (sat) ~ N(0, (sat)) (sat): Error in Expanding Short-Duration Counts and Daily Variability
Impact of SatelliteSupply —Equivalent Satellite Coverage (ESC)
Extensions • More image- vs. ground-based comparisons • Expansion of short-interval flows • Improved hourly factors • Quantification of uncertainty in sub-hour expansion • Bayesian and model-based estimation • Spatial correlations • Satellite and air-based sampling strategies • Other Uses of Volume Data • Statewide truck OD estimation • Screening tool: growth factors, ground-based sample strategies • Implementation strategies • …