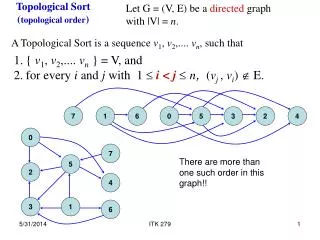
Download
1 / 50
500 likes | 635 Vues
This presentation by S. Shiry and Masoomeh Bahreini explores the fundamentals of navigation in robotics, focusing on topological navigation methods. Navigation is essential for mobile robotics, encompassing critical functions such as localization, path planning, and map making. The discussion contrasts metric and topological navigation, highlighting their applications, advantages, and limitations. Key elements include Voronoi diagrams and map construction techniques, which are pivotal for effective navigational strategies. This comprehensive study aims to merge both navigation models for more efficient robotic implementations.

E N D
Introduction toTopological Navigation prof:S.Shiry Presenter:Masoomeh Bahreini M.Sc Computer Science Department of Computer Eng. and IT Amirkabir Univ. of Technology (Tehran Polytechnic) winter1383
Objectives • Definition of Navigation • Fundemental functions of navigation • Type of Navigation • Topological Navigation • Vornoi Diagram • Metric Navigation • Summary • Refrence • AppendX
Definition of Navigation Robot navigation is one of the key issue in mobile robotics It consists in driving a robot throgh a given environment,using the information from sensors
Fundemental functions of navigation • Primary functions of navigation: • Where am I? • Localization:relative or absolute • Where am I going? • Usually defied by human operator or mission planner • What’s the best way to get there? • Path planning:qualitative & quantitative • Where have I been? • Map making
Type of Navigation • Metrical Navigation • Needs a geometric model of the world. • Assumes exact sensor information. • Allows a more precise navigation. • Topological Navigation • Leads to a qualitative description of the navigation goals. • Uses a flexible, easy to define, map. • Not suitable for very precise applications. • Ideal Solution • Merge both navigation models. • Metrical: local, more precise, navigation. • Topological: global, less precise, navigation.
Type of Navigation topologic map(qualitive) metric map(quantitive)
Type of Navigation • Navigation • Topological vs Metric methods • Metric methosd: • Potential fields • Topological methods: • Waypoints • Visibility graphs • Vornoi Diagrams
Topological Navigation • Steps of topological navigation • Define topological map • Costruct a Global map • Sence • Sensors:vision,sonar,laser • Construct Local map • Navigation
Topological Navigation • Define &Construction global map • The map should be useful to the application • Amount of abstraction in modeling world • Can be represented as a directed graph where: • Nodes: correspond to key-places in the map. • Transitions: used to travel between key-places. • In robotic soccer, one could have: • Nodes: field zones (half-field, penalty areas). • Transitions: basic movements (turn left, move forward).
Topological Navigation • Global Map (world model) • Provided :user,robot(exploration) • User map:unaccurate,not detailed • the robots will have to be able to deal with inaccuracies and lack of details that comes with the maps provided by users. • It does not require accurate metric and geometric information, and details about obstacles inside the environment can be omitted. • map can be given as a bitmap image,
Topological Navigation • Scale is unknown • Scale is not uniform across the map. • Geometrical details are not available. • Details exact shapes of the walls, • shapes of intersections,… • Obstacles are left out of the map. An Example of a Sketch Floor Map
Vornoi diagram • Let P = p1, p2, . . . , pn be a set of points in the 2 dimensional Euclidean plane. P is called the generators. partition the plane by assigning every point in the plane to its nearest point p.P. All those points assigned to pi form the Voronoi region V (pi), that is,V (pi) = {x : |pi - x| = |pj - x| .j = i}. note that some points do not have a unique nearest neighbor. The set of all points that have more than one nearest neighbor forms the Voronoi diagram V(P) A Voronoi vertex is a point p . V(P) that has more than 2 nearest neighbors and a Voronoi edge is a set of points that forms a boundary between Voronoi regions.
Vornoi diagram p1 p1 p3 p2 p2
Vornoi diagram • Vornoi diagram with 2 points
Vornoi diagram • Vornoi diagram with 3 points
Vornoi diagram • Vornoi diagram of floor map
Augmented Topological Map • a traditional topological map is a graph that represents connectivity between landmarks, without containing any metric or geometrical information. • +-intersectionis a node connected with 4 arcs that extends approximately perpendicularly to each other. • T-intersectionis a node that is connected with 3 arcs, with two of them perpendicular to the other. • Endpointis a node that where the Voronoi diagram ends at a wall. • Dead-endis a node that has 3 neighbors, and two of them are Endpoints. • Corneris a node that has 3 neighbors, and one of them is an Endpoint. • Genericnodeis a node that is not any of the above
Map Localization • Essential step for navigation (topological or metrical). • In the topological case, it’s equivalent to identify in which node (of the graph) the robot is. • Might be expressed as a classification problem. • current input map projection is compered to the projection of global map • Make use of k-nearest neighbour method to localize the robot in a node/class.
Map Localization • Method of matching • Iconic: • use raw (or near raw) sensor readings • Feature-based: • use features extracted from raw data • Label and match corners, walls • Less features, so less computations • Metric map-making relies on iconic localization • Toplogical map-making relies on Feature-based localization
Map Localization • Match between nodes • Two nodes strictly match if • they have the same number of neighbors • have the same attributes, without considering diference of labels. • For example, a Corner node v that has three neighbors v1, v2, v3 with v2 as the Endpoint matches with a Corner node w that has three neighbors w1,w2,w3 with w1 as the Endpoint.
Map Localization • Two nodes match if they are strictly match • or one of them is a generic node and they have the same number of neighbors • A generic node match everything that has the same number of neighbors as itself.
Map Localization • Robot Pose • a directed arc ij in a topological map that the robot is moving on • robot is somewhere between node i and j, and is heading to node j. • Multiple Hypothesis Tracking.(MHT) • Partially Observable Markov Process(POMP) • Given the last probality distribution and the current observation and action,calculate the probality of being in a state
POMDP • It get states, actions, transitions,observations • (a set of things that can be perceived by the agent ) • An observation function maps each state (or sometimes state/action pair) to a probability distribution over observations • there are unobservable state variables • it is important to estimate missing information and to acquire better strategies that incorporate the prediction of environmental behaviors.
Path Generation • Robot is aimed to sweep throgh all the reachable places of the terrain • Nodes of the graph considered as goals • Use of search algorithms, applied to the graph. • Large Graphs: • Define an heuristic. • use A* • Find the shortest path from start node to a goal node. • Small Graphs • simple search, so it’s not worthy to use an heuristic. • reduce A* or breadth-first search.
Path Following • Ideally, it corresponds to the sequential execution of the transitions defining the generated path. Nevertheless… • Dynamic environment subject to sudden changes. • Some transitions show more than 50% failures. • A failure detection and new path generation mechanism is needed.
Topological Navigation using Occupancy Grid • Each cell of the occupancy grid contains a probality value which is an estimation that the representation position is occupied by some object Occupancy grid can be viewd as a 2-d grayscale image of the environment Digital image processing are valid approaches Skeletization Thinig Vornoi diagram
Topological Navigation using Occupancy Grid • Steps of map building • Gloabal grid building • Sensor interpretation • sonar • Integration over time • Different sensors give different values for a grid cell because of noise and changing viewpoint it’s important to integrate the conditional probalities of distinct moments • Pose estimation • Local map is match with a global map
Topological Maps Use Landmarks • A landmark is one or more perceptually distinctive features of interest on an object or locale of interest • Natural landmark: configuration of existing features that wasn’t put in the environment to aid with the robot’s navigation (ex. gas station on the corner) • Artificial landmark: set of features added to the environment to support navigation (ex. highway sign) • Roboticists avoid artificial landmarks!
Desirable Characteristics of Landmarks • Recognizable (can see it when you need to) • Passive • Perceivable over the entire range of where the robot might need to view it • Distinctive features should be globally unique, or at least locally unique • Perceivable for the task (can extract what you need from it) • ex. can extract relative orientation and depth • Be perceivable from many different viewpoints
Topologial Navigation • Information required to represent each node must be gathered • a set of images P of the space where the robot will navigate • General enouph to represent all the areas of cs
Principal Components Analysis • Use PCA (KL) to compress the information in P • Extraction of • Eigenimages • eigenvectors of the training images covariance matrix: R = X XT • Use only the most significant components – higher eigenvalues.
Construction Square Error The number of eigenvalue Choose to represent eigenspace These expressions provide a criteria to choose the number of eigenvectores
Map construction • PCA • compute principle images • Space after computation :principle space • project each image in the principle space, associating the projection with the node of graph
Metric Navigation • A geometric map represent objects according to their absolute geometric relationships. • Localization • A sensor-drived geometric map must be matched against a global map of a large area
Summary • Map-based navigation is limited to laboratory setting with well-structured environment • Have not been tested extensively in real-world environment • Require a significant amount of processing and sencing • Higher level task can be performed by the robot after successful exploration.
Summary • Localization and map making are intertwined • Localization requires good maps • Map making requires good localization
Future work • Sensor selection and sensor fusion for specific applications and environments. • Accurate and reliable algorithms for matching local maps to the stored map. • Good error models of sensors and robot motion. • Good algorithms for integrating local maps into a global map. • Higher level task can be performed by the robot after successful exploration
Refrence • Vachirasuk Setalaphruk Atsushi Ueno Izuru Kume Yasuyuki Kono” Robot Navigation in Corridor Environments using a Sketch Floor Map” • Gon¸calo Neto, Hugo Costelha, Pedro Lima “Topological Navigation in Configuration Space Applied to Soccer Robots • Szabo, R. /Topological Navigation of Simulated Robots using Occupancy Grid, pp. 201 - 206, International Journal of Advanced Robotic Systems, Volume 1, Number 3 (2004), ISSN 1729-8806 • J. Borenstein , H. R. Everett , and L. Feng Contributing authors: S. W. Lee and R. H. Byrne“Where am I?Sensors and Methods for Mobile Robot Positioning”
Measurement type in Navigation • Relative • Odometry • Absolute • Active Beacons • Landmark Recognition • Artificial • Distinctive artificial landmarks are placed at known locations in the environment • 3 or more landmarks must be ‘in view’ to allow pose estimation • Detection these landmarks are easier for knowing size and shape • Natural • Distinctive features in the environment • Vertical edges :doors,wall junction • Environment must be known in advance
Measurement type in Navigation • Model Matching • Information acquired from sensors is compared to a map or world model of the environment • Geometric • Represent the world in a global coordinate system • Toplogical • Represent the world as a network of nodes and arcs