Robotic Arm Controlled Biopsy Needle
170 likes | 291 Vues
This project focuses on developing a robotic arm-controlled biopsy needle system to enhance surgical precision. Current manual methods lack accuracy, leading to potential failures. Our team, including Ryan Augustine, Brian Frederick, Nate Gaeckle, and Gordy Lawrence, collaborates with Dr. Myron Pozniak and advisor Dr. Naomi Chesler. The new design aims to integrate seamlessly with ImageGuide technology while ensuring rapid needle advancement and extraction. With rigorous safety checks and innovative hydraulic and pneumatic options, we aim to create a reliable tool for minimally invasive cancer diagnosis. ###

Robotic Arm Controlled Biopsy Needle
E N D
Presentation Transcript
Robotic Arm Controlled Biopsy Needle Team Members: Ryan Augustine Brian Frederick Nate Gaeckle Gordy Lawrence Client: Dr. Myron Pozniak Advisor: Dr. Naomi Chesler
CT Procedure • Initial CT taken • Splices are integrated to form image • Physician manually inserts needle in appropriate trajectory and distance • Inaccurate – chance of failure • A more precise system needs to be developed
ImageGuide • Produced robotic arm technology • Computer receives information from the CT • Controls movement of arm in 6 degrees of freedom • Currently has mechanism to advance needle at rate of 2 cm/s
Design Requirements • Needle must be advanced subcutaneous before firing • Needle must be fired fast enough to utilize inertia of body tissue • Needle must be extracted rapidly with tissue sample • Work in conjunction with ImageGuide technology • computer system to control position • Preserve remote center of motion • Device must not be any longer than 30 cm • Radiolucent material • Must have redundant safety checks
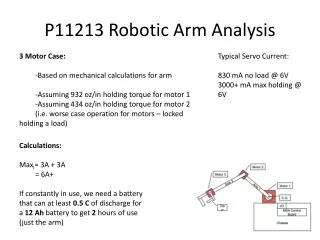
Mechanical Driver • Doctor Manually controls speed and advancement of needle • Sensor advances to control distance needle travels • Gear ratio is optional
Hydraulic Design Option Fluid Compressor Unit Linear Drive Mechanism
Hydraulic Design Option • Pros • Can be rapidly fired and retracted by dual piston action • Can be manufactured with materials compatible with CT Imaging. • Will generate enough power and velocity for design requirements • Cons • Difficult to design • Accuracy maintained over many usages
Pneumatic • Can be rapidly fired and retracted by air • Can use radiolucent materials • Can generate enough force needed • Difficult to design
Other Designs • Sewing Machine • Rotary Cam • Solenoid
Design Matrix ____________________________________________________________________________________________________________________________________________
Future Work • Determine more specific design specifications • Meet with Hydraulic/Pneumatic expert • Decide on most promising design option • Begin prototype design • And hopefully, prototype testing and refining
References • ImageGuide, Inc. Feb. 16, 2004. Image-Guided Robotics for Minimally Invasive Cancer Diagnosis and Therapy. PowerPoint Presentation. • Pozniak, M. 2004. Personal Interview.