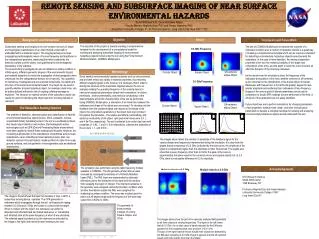
Surface and Subsurface Mooring Telemetry
Surface and Subsurface Mooring Telemetry. Inductive and acoustic technology and expertise that SIO brings to the OOI . Inductive Communication. Uses Jacketed steel mooring wire as data transmission line.

Surface and Subsurface Mooring Telemetry
E N D
Presentation Transcript
Surface and Subsurface Mooring Telemetry Inductive and acoustic technology and expertise that SIO brings to the OOI
Inductive Communication Uses Jacketed steel mooring wire as data transmission line. Allows for data transfer from a moored instrument several kilometers away from controller. 1200 baud data rate. Active current consumption ~15mW (very low power). Also possible to reconfigure instrument setup (sample rate, delay, calibration coefficients) after deployment.
Iridium Satellite Communication to Buoy In this terminal window, we are communicating through Iridium to the surface buoy controller on a currently deployed SIO mooring. Controller configuration data are displayed. Command entered to check controller parameters Controller parameters returned, with option to change
Iridium Satellite Communication to Buoy In this example we are showing the capability to check and modify parameters of a surface serial pH instrument. Communicate with serial pH instrument Interrupt pH instrument schedule
Iridium Satellite Communication to Buoy Once the schedule has been interrupted, we can serially communicate with the pH instrument from shore, as shown here. Surface pH menu User-alterable pH parameters
Iridium Satellite Communication to Buoy Once parameters are set, we restart the deploy loop. Command to start deploy loop Summary of pH settings Deploy loop confirmation
Inductive Communication to Instrument Here we are communicating through Iridium to the surface controller, which can then communicate to an inductive instrument further down on the mooring line. Command to connect to inductive modem Request last CTD sample, and response from CTD @ 20m Request CTD sample parameters
Inductive Communication to Subsurface Controller In this example, we will communicate inductively to another controller at 40m depth. Command to open up inductive communication line ID of controller at 40m
Inductive Communication to Subsurface Controller Here we are in the menu of the controller at 40m. Check configuration of controller at 40m User-alterable controller parameters
Inductive Communication to Subsurface Controller Finally, we can inductively reprogram a serial instrument (in this case a pH sensor) connected to our 40m controller, all from a terminal on shore. Command to communicate with peripheral instrument Peripheral instrument: pH Interrupt pH sampling schedule
Inductive Communication to Subsurface Controller The remote configurability of a system like this is a noteworthy and valuable asset to the OOI. 40m pH sensor status returned through subsurface controller, up inductive line, and through iridium network to shore.
Inductive Communication Summary This is technology that we are currently using in existing projects and have been developing for several years. Inductive communication is reliable and efficient. The SIO expertise in this field is being applied to the OOI Global Hybrid Profiler and Mesoscale Flanking Moorings designs, OOI Operations and Maintenance concepts, and the OOI Data Management Plan.
Acoustic Telemetry for Subsurface Moorings • Direct communication and data telemetry is only possible on moorings with surface expression - communication with remote subsurface moorings requires acoustic transmission to a surfacing unit. • SIO uses gliders to dive and acoustically recover the data stored in subsurface mooring controllers and transmits these data to shore. • These SIO developments will enhance technology used in the OOI.
Glider at Global Scale Nodes • Gliders will be used to increase the spatial resolution of the measurements of global scale nodes as well as for data and command transfer between subsurface moored platforms and the shore station.
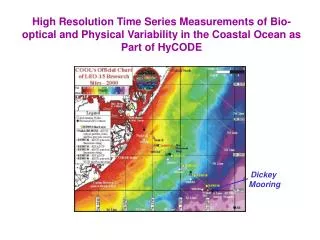
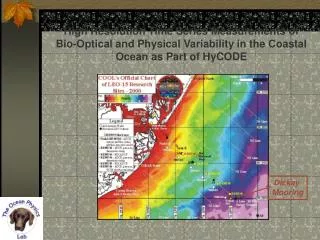
Principle of Glider Acoustic Data Download Instruments on subsurface moorings and bottom sensors sample autonomously during deployment. A glider measures oceanographic parameters during its mission along the experiment section.
Principle of Glider Acoustic Data Download Instruments on subsurface moorings and bottom sensors sample autonomously during deployment. A glider measures oceanographic parameters during its mission along the experiment section. The glider and bottom sensors are equipped with an acoustic modem, the glider can retrieve data collected by the bottom sensor.
Principle of Glider Acoustic Data Download The glider continues its measurements while proceeding to the mooring site, where data has been inductively collected and stored in an acoustic modem.
Principle of Glider Acoustic Data Download The glider continues its measurements while proceeding to the mooring site, where data has been inductively collected and stored in an acoustic modem. At the mooring the glider retrieves these data acoustically.
Principle of Glider Acoustic Data Download The glider surfaces to transmit the collected data to shore via an Iridium satellite link. Further instructions for the glider are received from the shore station.
Currently Deployed Glider Route SIO is using this method to retrieve data from an array of 2 endpointmooringsand 5 bottom sensors spanning 1000km offshore across theCalifornia Current. The CORC Array (red line) across the California Current Full track of the glider along the section Close-up of the actual glider track (green) around the western mooring site. Red arrows show the drift.
Transfer Performance • Performance of acoustic transfer depends on the seafloor topography, the depth of the acoustic modem in the mooring and depth and relative location of the glider. • Left: CORC-1 mooring on flat seafloor, constant performance; • Right: CORC-2 mooring in an seamount area, initial communication wasn't successful. High success rates after an optimal glider loitering location around the mooring was found.
Current Subsurface Mooring Data Full deployment temperature data from the western CORC subsurface mooring shown. Latest glider data transmission received May 14, 2011.