Matrix
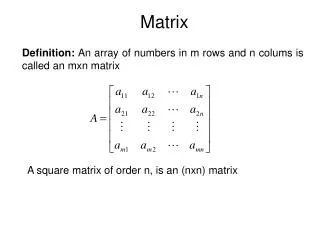
Matrix. <Definition> Matrix 矩陣 An n by m matrix is an array of objects arranged in n rows and m columns. ● n by m = n x m (n rows x m columns) ● objects : numbers, functions,… ● row 行, column 列 ● If n = m Square Matrix. 1st column. 2nd column. 3rd column. 1st row.

Matrix
E N D
Presentation Transcript
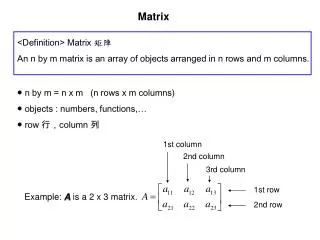
Matrix <Definition> Matrix 矩陣 An n by m matrix is an array of objects arranged in n rows and m columns. ● n by m = n x m (n rows x m columns) ● objects : numbers, functions,… ● row 行,column 列 ●If n = m Square Matrix 1st column 2nd column 3rd column 1st row Example: A is a 2 x 3 matrix. 2nd row
<Definition> Equality of Matrices are equal if and only if 1. They have the same number of rows, the same number of columns, 2. And for each i and j, ● Matrix Addition: If are n x m matrices, ● Product of a scalar and a matrix: If and α is a scalar,
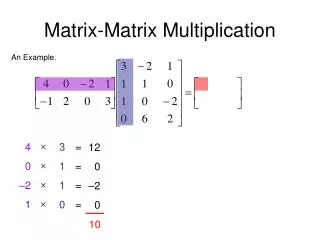
● Multiplication of Matrices : Let be an n x r matrix, be an r x m matrix. The matrix product AB is the n x m matrix, whose i, j element is i.e. ● Some Properties: 1. 2. 3. 4. ● Some Differences: 1. Possibly 2. No cancellation in products 3. The product of two non-zero matrices may be zero.
Special Matrices ● Zero Matrix: Zero matrix is n x m matrix, having each element equal to zero. Example: If A, B are n x m matrices,
● Square Matrix: An n x m matrix A. If n=m, A is a square matrix. ● Identity Matrix: : n x n identity matrix, having i, j element = Example: A is n x m matrix.
● Transpose (轉置): is n x m matrix. Transpose of A is m x n matrix Example: ● Some Properties: 1. 2. 3. If AB is defined, Proof (3):
and If n-vector n-vector Then
Matrix Notation for Systems of Linear Equations Example: Where Example:
Elementary Row Operations <Definition> Three Elementary Row Operations Type I : Interexchange two rows of A Type II : Multiply a row of A by a nonzero constant Type III : Add a scalar multiple of one row to another one Example: <Definition> Elementary Matrix E An elementary matrix is a matrix formed by performing “an elementary row operation” on . Example:
<Theorem> Let A be an n x m matrix. Let B be formed from A by an elementary row operation. Let E be the elementary matrix by performing this elementary row operation on . Then : ith elementary row operation : elementary matrix corresponding to
<Theorem> Let A be an n x m matrix. If B is produced from A by finite sequence of elementary row operations, then there is a n x n matrix Ω such that Example: <Definition> Row Equivalent Two matrices are row equivalent if and only if one can obtained from the other by a sequence of elementary row operations. B is row equivalent to A
<Theorem> • Every matrix is row equivalent to itself. • If A is row equivalent to B, • then B is row equivalent to A. • 3. If A is row equivalent to B, • B is row equivalent to C, • then A is row equivalent to C. <Theorem> Let E1 be an elementary matrix that performs an elementary row operation on a matrix A. Then there is an elementary matrix E2 such that E2E1A=A i.e. For any E1, exist E2 such that E2E1 = In (對任意E, 存在一逆轉操作)
The Row Echelon (階層) Form of a Matrix (i.e. Reduce Matrix) • <Definition> Reduced Row Echelon Matrix ( AR ) • A matrix is in “reduced row echelon form” if • 任何 nonzero row 的第一項為 1. • 若某一 row 的第一項在第 j column, 則其他 row 的第 j 項都為 0. • 所有 zero row 排在最下面. • Row 排列時, 第一非零項出現位置在較前面的排在較高. • 符合上述要求的 matrix A 稱為 Reduce Matrix AR Example:
<Theorem> Every matrix is row equivalent to a reduce matrix. 亦即, AR要經由 Elementary Row Operations 獲得。 <Theorem> Let A be an n x m matrix. There is an n x n matrix Ω such that ΩA = AR. How to get Ω? Example: [ In : A ] [ Ω : AR ] <Theorem> Let A be a matrix. There is “exactly one” reduce matrix AR that is row equivalent to A. P.S. 由A產生AR的過程以及對應的Ω可能不同,但最終的AR一樣。 Example:
Row Spaces, Column Spaces, and Rank A : n x m matrix Its row vectors are in Rm. The linear combination of row vectors form a subspace of Rm. Row Space of A. Its column vectors are in Rn. The linear combination of column vectors form a subspace of Rn. Column Space of A. Example: <Theorem> For any matrix A having real numbers as elements, the row and column spaces have the same dimension. The dimension = Rank(A)
<Theorem> Let B be formed from A by an elementary row operation. Then the row space of A and the row space of B are the same. • For any matrix A, the row spaces of A and AR are the same. Example: <Definition> Rank 階 Rank(A) = the dimension of the row space of A = the dimension of the row space of AR = the number of nonzero rows of AR = Rank(AR)
Solution of Homogeneous Systems of Linear Equations <Theorem> The linear homogeneous systems AX=0, ARX=0 have the same solutions. Proof: 1. AX=0 ARX=0 2. ARX=0 AX=0 • Gauss-Jordan Method: • Find AR • Write down equations, • Set parameters, • Form general solution Solution Space of AX=0. • Example:
<Theorem> Let A be an n x m matrix. The set of solutions of the system AX=0 is a subspace of Rm. Proof: 1. is in S. 2. The sum of any vectors in S is in S. 3. The product of any vectors in S with any real number is also in S. <Theorem> Let A be n x m. The solution space of the system AX=0 has dimension m – Rank(A). <Theorem> Let A be n x m. Then the system AX=0 has a non-trivial solution if and only if m > Rank(A).
A be n x m. The system AX=0 has a trivial solution if m = Rank(A). Trivial solution: ● A homogeneous system AX=0 with more unknowns than equations always has a nontrivial solution. m : unknowns n : equations Rank(A) ≦ n If m > n, m > Rank(A) has a nontrivial solution. ● Let A be an n x n matrix of real numbers. Then the system AX=0 has only the trivial solution exactly when AR = In. AX=0 ARX=0, when AR = In In X =X=0 = trivial solution.
Non-Homogeneous Systems of Linear Equations ● Homogeneous: AX=0 ● Non-homogeneous: AX=B ● For all homogeneous systems AX=0, have at least the trivial solution: X=0 ● For non-homogeneous systems AX=B solution may has no solution. Has a solution: consistent Has no solution: inconsistent
<Theorem> Let UP be any solution of AX=B. Then every solution of AX=B is of the form UP+H, in which H is a solution of AX=0. Proof: 1. 2. ● UP: Particular Solution 特解 ● H+UP: General Solution 一般解 <Theorem> Let A be n x m and let B be m x 1 . Then for some m x 1 matrix C, [A:B]R = [AR:C]. Example:
● Augmented Matrix [A:B] <Theorem> Let A be n x n. Then the homogeneous system AX=B has a unique solution if and only if AR=In . Example: <Theorem> The nonhomogeneous system AX=B has a solution if and only if A and [A:B] have the same rank. Proof: see textbook Example:
Matrix Inverses <Definition> Let A bean n x n matrix. Then B is an inverse of A if AB=BA=In . A, B 互為 inverse. Inverse of A = A-1 ● Inverse 未必存在 <Definition> A square matrix is nonsingular if it has an inverse. A square matrix is singular if it has no inverse. ● 對某個矩陣,其 Inverse 只有一個. <Theorem> Let B and C be inverse of A. Then B=C. Proof: B=B(In)=B(AC)=(BA)C=(In)C=C
● Some Properties • In is nonsingular and In-1 = In • If A and B are nonsingular n x n matrices, then AB is nonsingular and (AB)-1 = B-1 A-1 • If A is nonsingular, so is A-1, and (A-1)-1 = A • If A is nonsingular, so is At, and (At)-1 = (A-1)t • If A and B are n x n and either is singular, then AB and BA are singular. • Proof (#2): • Proof (#4):
<Theorem> An n x n matrix A is nonsingular if and only if AR=In or Rank(A)=n. ● Find A-1 : [In :A ] → [ΩIn : ΩA ] = [Ω : AR ] . When AR = In , Ω = A-1 • <Theorem> • Let A be an n x n matrix. • A homogeneous system AX=0 has a nontrival solution if and only if A is singular. • A nonhomogeneous system AX=B has a solution if and only if A is nonsingular. The unique solution is X=A-1B