Download
1 / 19
190 likes | 398 Vues
Development of Vision-Based Navigation and Manipulation for a Robotic Wheelchair. Katherine Tsui University of Massachusetts, Lowell. Goal: How do I get to…?. Photo from http://lib.store.yahoo.net/lib/umallvt/umall-directory-2006-05-26.gif. Wheeley: Hardware. Wheelesley v2

E N D
Development of Vision-Based Navigation and Manipulation for a Robotic Wheelchair Katherine Tsui University of Massachusetts, Lowell
Goal: How do I get to…? Photo from http://lib.store.yahoo.net/lib/umallvt/umall-directory-2006-05-26.gif
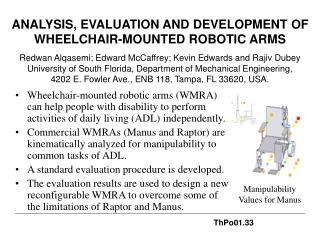
Wheeley: Hardware • Wheelesley v2 • Vector Mobility prototype chassis • Differential drive • RobotEQ AX2850 motor controller • Custom PC • Sensor platform • Vision system
Wheeley: Robot Arm • Exact Dynamic’s Manus Assistive Robotic Manipulator (ARM) • 6+2 DoF • Joint encoders, slip couplings • 14.3 kg • 80 cm reach • 20 N clamping force • 1.5 kg payload capacity • Keypad, joystick, single switch input devices • Programmable
Wheeley: Vision System • Manipulation • Shoulder camera • Canon VC-C50i • Pan-Tilt-Zoom • Gripper camera • PC229XP Snake Camera • 0.25 in x 0.25 in x 0.75 in
Wheeley: Vision System • Navigation • Videre Design’s STH-V1 • 19 cm x 3.2 cm • 69 mm baseline • 6.5 mm focal length • 60 degrees FoV
SLAM using Stereo Vision • Why use vision instead of traditional ranging devices? • Accuracy • Cost • Detail
Phission http://phission.org Videre Design’s Small Vision System (SVS) Simple Mapping Utility (pmap) Laser stabilized odometry Particle-based mapping Relaxation over local constraints Occupancy grid mapping Vision and Mapping Libraries
Human Cue Detection • Swarthmore Vision Module (SVM) • Basic text detector and optical character recognition
Manipulation: Motivation • Direct inputs from 4x4 keypad, joystick, or single switch • May not correlate well with user’s physical capabilities • Layered menus • Micromanage task and progress
Manipulation: Experiments • Able bodied, August 2006 • Confirmed: With greater levels of autonomy, less user input is necessary for control. • Confirmed: Faster to move to the target in computer. • Unconfirmed: Users will prefer a visual interface. • Target audience, Summer 2007 • Access methods • Cognitive ability • Recreation of previous experiment
Future Work • Additional Wheeley modifications: • PC for mapping • Mount touch screen LCD • New Videre Stereo Head • Mount robotic arm • Integrate Wheelesley navigation
References and Acknowledgements • Bailey, M., A. Chanler, B. Maxwell, M. Micire, K. Tsui, and H. Yanco. “Development of Stereo Vision-Based Navigation for a Robotic Wheelchair.” in Proceedings of the International Conference on Rehabilitation Robotics (ICORR), June 2007. • K. M. Tsui and H. A. Yanco. “Simplifying Wheelchair Mounted Robotic Arm Control with a Visual Interface” in Proceedings of the AAAI Spring Symposium on Multidisciplinary Collaboration for Socially Assistive Robotics, March 2007. • Research supported by NSF grants IIS-0546309, IIS-0534364, and IIS-0415224. • In collaboration with Crotched Mountain Rehabilitation Center, Exact Dynamics, Swarthmore College, and the University of Central Florida.
http://www.cs.uml.edu/robots Questions?