Boosting MFC Application Debugging and Prototyping with Python and SWIG Integration
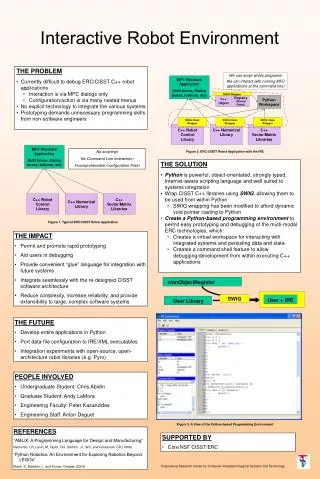
This project addresses the challenges in debugging and prototyping MFC-based robot applications by integrating Python with CISST C++ libraries via SWIG. The limitations of current MFC interactions, reliant on complex dialog menus and configuration files, can be overcome through a Python-based programming environment. This allows for rapid prototyping, easy debugging, and seamless integration of future systems. By creating a virtual workspace, users can interact intuitively with integrated systems, enhancing reliability and extensibility in complex software architectures.

Boosting MFC Application Debugging and Prototyping with Python and SWIG Integration
E N D
Presentation Transcript
We can script whole programs! We can interact with running MFC applications at the command line! MFC Windows Application (Edit boxes, Dialog boxes, buttons, etc) SWIG Wrapper Registry (Shared Object) C++ Object Python Workspace SWIG Class Wrapper SWIG Class Wrapper SWIG Class Wrapper C++ Robot Control Library C++ Numerical Library C++ Vector/Matrix Libraries cmnObjectRegister Interactive Robot Environment • THE PROBLEM • Currently difficult to debug ERC/CISST C++ robot applications • Interaction is via MFC dialogs only • Configuration/action is via many nested menus • No explicit technology to integrate the various systems • Prototyping demands unnecessary programming skills from non-software engineers MFC Windows Application (Edit boxes, Dialog boxes, buttons, etc) No scripting! No Command Line Interaction! Incomprehensible Configuration Files! Figure 2. ERC/CISST Robot Application with the IRE • THE SOLUTION • Python is powerful, object-orientated, strongly typed, Internet-aware scripting language and well suited to systems integration • Wrap CISST C++ libraries using SWIG, allowing them to be used from within Python • SWIG wrapping has been modified to afford dynamic void pointer casting to Python • Create a Python-based programming environment to permit easy prototyping and debugging of the multi-modal ERC technologies, which: • Creates a virtual workspace for interacting with integrated systems and persisting data and state • Creates a command shell feature to allow debugging/development from within executing C++ applications C++ Robot Control Library C++ Vector/Matrix Libraries C++ Numerical Library Figure 1. Typical ERC/CISST Robot Application • THE IMPACT • Permit and promote rapid prototyping • Aid users in debugging • Provide convenient “glue” language for integration with future systems • Integrate seamlessly with the re-designed CISST software architecture • Reduce complexity, increase reliability, and provide extensibility to large, complex software systems SWIG User + IRE User Library • THE FUTURE • Develop entire applications in Python • Port data-file configuration to IRE/XML executables • Integration experiments with open-source, open-architecture robot libraries (e.g. Pyro) • PEOPLE INVOLVED • Undergraduate Student: Chris Abidin • Graduate Student: Andy LaMora • Engineering Faculty: Peter Kazanzides • Engineering Staff: Anton Deguet Figure 3. A View of the Python-based Programming Environment REFERENCES “AML/X: A Programming Language for Design and Manufacturing” Nackman, LR, Lavin, M, Taylor, RH, Dietrich, Jr., WC, and Grossman, DD (1986) “Python Robotics: An Environment for Exploring Robotics Beyond LEGOs” Blank, D, Meeden, L, and Kumar, Deepak (2002) • SUPPORTED BY • Core NSF CISST/ERC Engineering Research Center for Computer Integrated Surgical Systems and Technology