Download
1 / 26
260 likes | 283 Vues
EcoDrive optimizes fuel consumption by controlling acceleration, air/fuel injection rate, and driver behavior, leading to significant savings. The system integrates sensing, modeling, and control strategies for enhanced efficiency in urban and highway driving scenarios.

E N D
EcoDrive: A Mobile Sensing and Control System for Fuel Efficient Driving Lei Kang, Bozhao Qi, Dan Janecek and Suman Banerjee University of Wisconsin-Madison
EcoDrive Overview • EcoDrive models fuel consumption rate of each acceleration at each speed • EcoDrive controls fuel injection rate to control acceleration (human driver controls brake) 20% ~ 30% fuel savings More by sacrificing travel time
EcoDrive Overview STOP SPEED LIMIT 40km/h • Driver Conserver: Cruises at 1km/h (low efficiency speed) • Driver Aggressor: Accelerates to 40km/h in 1 second and cruise to the end (low efficiency acceleration) • EcoDrive: Calculates the fuel consumptions of various acceleration and cruising strategies
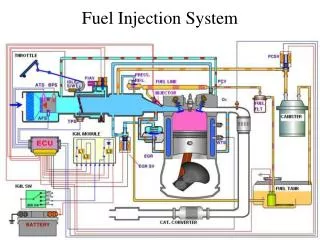
EcoDrive Architecture • Sensing OBD parameters • Modeling vehicle forces • Controlling air/fuel injection rate
OBD Data Collection • Urban: Madison and Chicago, 5000+ miles • Highway: Local highways and cross-state highways, 5000+ miles
Model Vehicles Forces • Engine Propulsion • Function of air/fuel rate and gear ratio (estimated by vehicular speed and engine RPM) • Drivetrain loss and wind resistance • Function of propulsion when driving in constant speed • Grade resistance • Function of altitude changes (extracted from online elevation dataset)
Build AFR Profile (A Lookup Table) AFR(v, a) : the air/fuel rate when accelerates at a (m/s/s) under speed v(km/h) Example
Computer Controlled Gas Pedal • Gas Pedal (drive-by-wire) • Human driver press the gas pedal • The position sensor senses gas pedal position • The gas pedal sends the position value to the Electronic Control Unit (ECU) • ECU controls the volumes of air/fuel injected into the engine • EcoDrive Controller (Emulate gas pedal) • It calculates the gas pedal position value • It sends the value to the ECU through an Arduino board
Driving from A to B by DP • D: A-B road segment length • V: speed limit • S(v, d): minimum fuel cost at distance d with speed v • Case 1: The car cruises to state (v + 1, d + 1) • S(v + 1, d + 1) = S(v + 1, d) + AFR(v + 1, 0) * time • Case 2: The car accelerates to state (v + 1, d + 1) at acceleration ax • S(v + 1, d + 1) = S(v, d - dx) + AFR(v, ax) * time
Implementation • Hardware • OBD Scanner with ELM327 USB interface • Arduino board converts digital gas pedal position to voltage signals • Software • One thread writes commands to OBD interface through serial communication • One thread reads OBD parameters and write gas pedal position to Arduino board
Evaluation • Real road test (over 100 miles) • Urban: Road segments with various lengths (50-1000m) • Highway: Various highway segments (2km each) • Comparison • Theoretical value • Human drivers • Cruise control
Urban Road Segment • Human drivers and EcoDrive: drive 10 times on the same road segment
Case Study: Cruise Control • Cruise control: accelerate aggressively on upslope or human manipulation • EcoDrive: gradually change air/fuel injection rate, adapt to road conditions
Highway Segment • Method: EcoDrive drives 2km on various speeds and compare with history driving data on same highway segments • Result: EcoDrve achieves 30% higher fuel efficiency for same travel time
Travel Time vs. KPL • EcoDrive achieves higher KPL than human drivers in similar travel time • EcoDrive provides a trade-off between travel time and fuel consumption
Highway Statistics • Drivers drive much faster than best KPL speed (green line) • Drivers drive at higher speeds than speed limits 55-70mph (90-110km/h)
Summary • EcoDrive controls fuel injection rate and achieves 20%~30% improvement than human drivers • EcoDrive has higher gas mileages than human drivers in same travel time • EcoDrive provides trade-offs between travel time and gas mileage • Cruise control is not fuel efficient when accelerating or going upslopes
Take-Aways • Gradually press gas pedal, avoid frequent press and release • Use cruise control, which generally performs better than human drivers • Drive under speed limit will have 20%~40% gas mileage improvements