Download
1 / 6
60 likes | 167 Vues
This study explores methods to guide a robot along the shortest but smooth path through a series of consecutive data points. We compare two interpolation techniques: Polynomial and Spline Interpolants. The length of the path calculated using Polynomial Interpolants is 14.9, while the Spline Interpolant results in a shorter path of just 12.9. This analysis highlights the effectiveness of spline interpolation in optimizing robot path planning, ensuring smoother transitions between points to enhance performance and efficiency.

E N D
Find a Smooth Shortest Path for a Robot http://numericalmethods.eng.usf.edu
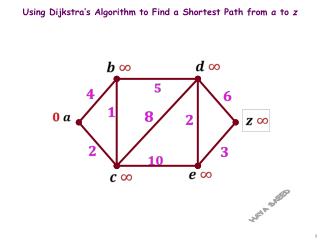
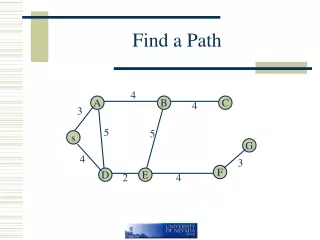
Points for Robot Path Find the shortest but smooth path through consecutive data points
Compare Spline & Polynomial Interpolant Path Length of path Polynomial Interpolant=14.9 Spline Interpolant =12.9