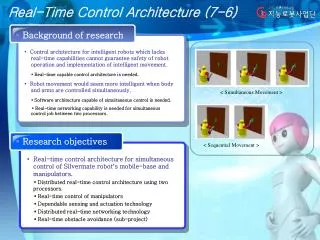
Real-Time Control Architecture for the SAUVIM Semi-Autonomous Underwater Vehicle
The SAUVIM (Semi-Autonomous Underwater Vehicle for Intervention Missions) utilizes a specialized real-time control architecture designed by researchers T.W. Kim, J. Yuh, and S.K. Choi from the University of Hawaii. Measuring 5.8m in length and weighing 6,500 kg in air, SAUVIM features a robust mechanical structure and a 7-DOF robotic motion control system. It incorporates several advanced navigation sensors and health monitoring systems, enabling efficient underwater operations, including obstacle avoidance and localization. Modified hierarchical architecture improves programming flexibility and system performance.

Real-Time Control Architecture for the SAUVIM Semi-Autonomous Underwater Vehicle
E N D
Presentation Transcript
Real-Time Control Architecture for SAUVIM T.W.Kim, J.Yuh, S.K.Choi Autonomous Systems Lab. University of Hawaii, U.S.A.
Semi-Autonomous Underwater Vehicle for Intervention Missions (SAUVIM)
Mechanical Structure • Al 6061 • 5.8m L 2.1m W 1.8m H • 6,500kg (air), -2kg (wet) • Six pressure vessels (33cm inner dia. 46cm long) • 1.4m long 7 DOF robot
Motion Control System • 6 Technodyne 1020 thrusters • 2 Technodyne 2010 thrusters • Max Speed : 3 knots • Operating range: 2.7 nautical miles • 3 fins with stepper motors
Navigation Sensors • 300KHz RDI DVL: vehicle speed, attitude, heading • Watson IMU: angular vel. & acc., heading • TCM2: attitude, heading • MSP: attitude, heading • Imagenex : scan sonar • Tritech : pointing sonar
Health Monitoring System • Located in each PV • One chip micro-controller (BASIC Stamp II-sx) • Battery voltage • Leakage • Pressure • Humidity • RS485 multi-drop comm.
Sonars & Cameras • Two Imagenex 881 scanning sonars (forward & backward): obstacle avoidance, localization, object acquisition • Seven Tritech PA200 range sonars: obstacle avoidance, localization • Six CCD cameras with PC/104+
VME bus Nav. CPU I Nav. CPU II Nav. CPU I PC/104+ (Camera) PC/104+ (Scan Sonar) PC/104+ (Scan Sonar) PC/104+ (Camera) PC/104+ (Laser) DAADIO B/D DAADIO B/D DAADIO B/D JR3 I/F B/D Comm. B/D Res. I/F B/D Computer H/W Configuration Navigation Controller Arm Controller VME bus
S/W Architecture • Pros • easy to verify controllability and stability • feasible to evaluate the controller performance
S/W Architecture • Cons • lack of flexibility • An attempt to modify some functionality requires significant modification of the whole S/W • long response time • sensor integration/fusion is difficult • Modified Hierarchical Arch. with Sensor Data Bus
Task Description Language • Using lex/yacc compiler tools • Easy to use/add/modify • Satisfy the minimum requirements for AUV lang. • Numerical operations including arithmetic operations and Boolean operations • Motion commands • Condition commands • Loop commands • I/O commands to control specific H/W • Application-specific commands such as depth or speed control for AUVs
STDL Primitives & Operators • Motion commands : fd, bk, up, dn, movex, movey, movez, moveto, rt, lt, pitch, yaw, roll, fin • I/O commands : on, off, onfor, ain, aout, din, dout • Multi-tasking & Event commands : task, when, every • Arithmetic operators : +, -, *, /, % • Boolean operators : and, or, not, >, <, ==, >=, <=, != • Loop commands : repeat, endrep, loop, endloop, for, endfor, while, endwhile, stop • Conditional commands : if, else, endif, switch, case, default, break • Miscellaneous commands : proc, endproc, output, define, wait, waituntil, goto, set
Concluding Remarks • Real-time distributed H/W & S/W • Modified hierarchical architecture with sensor data bus • SAUVIM Task Description Language for flexible programming • SAUVIM is under test in shallow water • More progress and results are on www.eng.hawaii.edu/~asl