Tracking
Tracking involves monitoring the state of an entity over time using sensors to collect data, which is then processed to determine the entity's true state. This process includes calibration, data integration, and noise reduction to improve accuracy. In VR applications, tracking plays a crucial role in enabling users to interact with virtual environments effectively. Pose tracking, object tracking, and evaluating tracking systems' performance are vital aspects to consider for optimal VR experiences.

Tracking
E N D
Presentation Transcript
Tracking • Tracking is following the state of an entity over time • What is state? • Sensors collect data = F(H(state))+ noise • H is how the measurement is related to state • F is the measurement function itself • Most often “sampled” (i.e. discrete, k, k+1, k+2…) at some rate and resolution • Trackers approximate true state from sensor data • Calibration to determine unknown parameters of F, H • Data integration to determine state • Filter to reduce noise (e.g. Kalman Filter) • Sensing and Tracking take finite non-zero time to perform
Tracking example • Following the position of a falling object with an accelerometer • Acceleration sensor sends a value • Value must be some function of our state + some error • Data = F(H(state))+noise • What is H? • How to calibrate? (Determine F) • How to find position? (Determine state) • How to remove noise?
Tracking Systems • What we are usually concerned with as VR Scientists/Engineers • Choice based on application • “no silver bullet” • Application Requirements • Application Constraints
Tracking for VR Applications • Enable the user to influence the virtual space • Locomotion • Interaction • Control • Tracking system influences • Usability • Presence • Task performance • The single biggest “problem” in VR/AR/MR • “Pose” is the most commonly tracked state
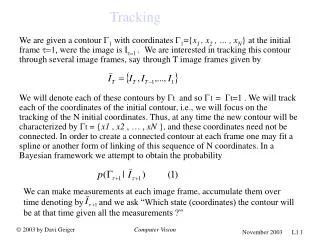
Y Z X Pose Tracking • Track position and orientation of a rigid object with respect to another coordinate system. • Why rigid? Y Z X Object Coordinates Object Pose Tracker Coordinate System
Degrees of freedom • The amount of pose information returned by the tracker • Position (3 degrees) • Orientation (3 degrees) • There are trackers that can do: • only position • only orientation • both position and orientation
Question • Given that I want to track your head, I attach a new tracker from NewTracker Corp. it returns 6 degrees of freedom (6 floats). What questions should you have? • What are some evaluation points for a tracking system?
Tracking Performance • Accuracy • Difference between an object’s pose and the reported pose • Resolution • Granularity that the tracking system can distinguish individual points or orientations • Jitter • Change in reported position of a stationary object (Gaussian noise) • Drift • Steady increase in error with time
Tracking Performance • t0– time when object is at point p • t1– time when sensor reports p • Lag or Latency – t1 -t0 • What causes latency? • Sensor acquisition time • Sensor transmission time • Tracker data processing time • Tracker transmission time • Filtering
Tracking Performance • Update Rate • Discrete sampling of time-continuous state into k measurements / second, or • Hz, KHz, MHz, GHz • Result of sensor, bandwidth limitations • Higher is better • Why?
Environmental Factors • Interference - external phenomenon that degrades system’s performance • Occlusion • Tracking space distortions • Echos
Mass, Inertia and Encumbrance • VR Users already burdened by displays • Trackers often add more weight, inertia, and wires, and other attachments
Working Volume • What is the shape? • Frustum • Hemisphere • Performance may change with object state • E.g. distance from sensor often decreases performance exponentially
Multiple objects • Number of potentially tracked points • Unique • Simultaneous • Difficulties • Sensing interference • Multiplexing (lower update rate) • More processing/transmission time
Cost • Monetary • You generally get what you pay for. ($30-$100k+) • Consumer gaming market lowering price/performance ratio • Space • For same working volume, some tracking systems require more physical space. • Setup • How long does calibration take? How long does it last? Can it be performed by an end-user? Does it require special equipment? How difficult is it?
Performance Accuracy Resolution (precision) Jitter (zero mean) Drift (non-zero mean) Lag Update Rate Environment Interference Mass, Inertia and Encumbrance (wires) Space (Range) Number of tracked entities Cost Monetary Setup Space Evaluation Criteria Which of these are most important?