Reversible watermarking
Reversible watermarking. Wu Dan 2008.9.10. Introduction. Difference expansion Histogram bin shifting. Expansion Embedding Techniques for Reversible Watermarking. Diljith M. Thodi and Jeffrey J. Rodr í guez ,. IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 16, NO. 3, MARCH 2007.

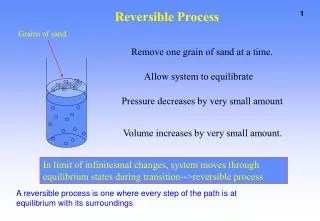
Reversible watermarking
E N D
Presentation Transcript
Reversible watermarking Wu Dan 2008.9.10
Introduction • Difference expansion • Histogram bin shifting
Expansion Embedding Techniques for Reversible Watermarking Diljith M. Thodi and Jeffrey J. Rodríguez, IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 16, NO. 3, MARCH 2007
I alternative approaches • Histogram-Based selection of locations
I alternative approaches • Histogram shifting
I alternative approaches • Histogram shifting • Notation and functions
II Difference-expansion based algorithms • Difference expansion with histogram shifting and overflow map (DE-HS-OM) • Decompose the image into differences and integer averages • Determine the changeable (C) and the expandable locations (E) • 2D overflow map (M) is losslessly compressed
II Difference-expansion based algorithms • Difference expansion with histogram shifting and flag bits (DE-HS-FB) Many of expandable differences are capable of undergoing multiple expansion/shifting. • Order of modifiability
Flag bits αβ I=(255,253) l=254 h=2 Non-Embeddable -1 -1 I=(255,251) l=253 h=4 Non-Embeddable -1 -1 I=(254,250) l=252 h=4 Changeable 0 0 I=(253,251) l=252 h=2 Expandable 1 0 I=(255,252) l=253 h=3 Changeable 0 0 I=(254,253) l=253 h=1 Expandable 1 0 I=(200,210) l=205 h=(-10) Expandable 3 2 I=(100,50) l=75 h=50 Expandable 1 0 FB|LSB|Secret=01011|01|1001 Lossless compression=100100
III expansion embedding • PE (prediction error expansion) based reversible watermarking OM FB LM PE DE +HS+
III expansion embedding • D1: DE with location map (Tian’s method). • D2: DE with histogram shifting and overflow map (DE-HS-OM). • D3: DE with histogram shifting and flag bits (DE-HS-FB). • P1: PE expansion with location map. • P2: PE expansion with histogram shifting and overflow map. • P3: PE expansion with histogram shifting and flag bits.
Adaptive lossless steganographic scheme with centralizeddifference expansion Chih-Chiang Lee, Hsien-ChuWu, Chwei-Shyong Tsai, Yen-Ping Chu Pattern Recognition 41 (2008,6)
Centralized difference expansion • for each component of a block, we can obtain a series of pixel values v0, v1, v2, . . . , vk−1. • Sorting these pixels in ascending order • take the medium value vmas a reference value
Adaptive embedding procedure I II III IV I
II III
I II III IV 0 1 0
Circular Interpretation of bijective transformations in lossless watermarking for media asset management Christophe De Vleeschouwer, Jean-François Delaigle, and Benoît Macq, IEEE TRANSACTIONS ON MULTIMEDIA, MARCH 2003
I Reversible embedding • Patchwork algorithm • Each image block is equally divided into two pseudo-random sets of pixels • Zones A and B have close average values before embedding. • After embedding, depending on the bit to embed, their luminance values are incremented or decremented.
II extraction and inversion process • Partition the image into blocks and zones A and B. • Zones A and B have close average values before embedding. • Histograms of each zone are mapped to the circle. For both zones, the center of mass is computed. • Let a be the angle between the vectors Ca and Cb , pointing from the circle center to each center of mass. • The sign of a provides the direction of rotation during the embedding process and enables bit retrieval and reversibility. • Once the embedded bit has been retrieved, the original block can be recovered.
Robust Lossless Image Data Hiding Designed for Semi-Fragile Image Authentication Zhicheng Ni, Yun-Qing Shi, Nirwan Ansari, and Wei Su IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, April 2008
I a novel robust lossless image data hiding algorithm • A Robust Statistical Quantity Used to Embed Data • Consider a given 8×8 image block, we split it into two sets A and B • For each block, we calculate the difference value , which is defined as the arithmetic average of differences of grayscale values of pixel pairs within the block.
Differentiating Bit-Embedding Schemes Based on Different Grayscale Distributions Within a Block of Pixels
Data Extraction Data extraction is actually the reverse process of data embedding and is much simpler than data embedding. For a given marked image, we first split it into nonoverlapping blocks and then calculate the difference value for each block in the same way as that used in data embedding. The main steps are described below.
If the absolute difference value is larger than the threshold K, the grayscale value distribution of the block is then examined. If the block is identified as Case 3 in Category 2, Case 2 in Category 3, or Case 2 in Category 4,the bit “0” is extracted, and the block remains unchanged. Otherwise, bit “1” is extracted and the difference value is shifted back towards the zero point by adding or subtracting the quantity. If the absolute value of the difference value is less than the threshold K, then bit “0” is extracted, and nothing to do on the pixel grayscale value of that block. Note that by combining this step and the above step in data extraction, it is obvious that all pixel grayscale values will be the same as in the original image. After data extraction, the inverse permutation and the ECC decoding are applied, respectively, so as to obtain the original information bits correctly. In this way, we can extract the original information bits and recover the original image without any distortion.