Structural Imaging of Earth using Teleseismic Body Waves
1.42k likes | 1.56k Vues
Explore the potential of teleseismic body wave scattering for high-resolution structural imaging of the Earth's interior. Understand receiver functions, source signatures, and wave interactions, utilizing global and exploration seismology approaches.

Structural Imaging of Earth using Teleseismic Body Waves
E N D
Presentation Transcript
STRUCTURAL IMAGING USING SCATTERED TELESEISMIC BODY WAVES Michael Bostock Department of Earth & Ocean Sciences The University of British Columbia ESIW-UCBerkeley, June 23, 2011
LECTURE - OUTLINE Introduction Geometrical Considerations Source-signature separation & Deconvolution One-dimensional studies Multi-dimensional studies
INTRODUCTION • high, frequency 0.1-4 Hz teleseismic body wave scattering • highest potential resolving capability of any component within the global seismic wave train • close analogy to reflection seismics
RECEIVER FNS vs SEISMIC REFLECTION - SIMILARITIES • > near-vertical wave propagation • > sub-horizontal stratification • > modest velocity contrasts • > single-scattering (Born) approximation
GLOBAL vs EXPLORATION SEISMOLOGY - 2 • > exploration studies have adopted acoustic approximation to model pure P-P back-scattering interactions (explosive source / vertical sensors) • > computationally and practically expedient
GLOBAL vs EXPLORATION SEISMOLOGY - 3 • > global studies rely principally on elastic, forward-scattering interactions
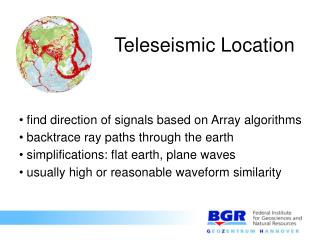
GEOMETRICAL CONSIDERATIONS > Key definitions > Teleseismic P > Teleseismic S > Other phases
KEY DEFINITIONS > Teleseismic wave: body wave recorded at epicentral distance > 30 degrees > Incident wave: contribution associated with primary body-wave phase reflected/ converted if at all only at Earth’s surface and/or core-mantle boundary (e.g. P, pP, PP, S, pS, PKP, SKS, ScS)
MORE KEY DEFINITIONS > Scattered wave: contribution to teleseismic wavefield generated through scattering of incident wave from receiver-side structure > Source: source signature and scattering from source-side structure
TELESEISMIC P - 1 most generally useful phase in receiver function studies propagation in lower mantle ( ) simple vs propagation in transition zone ( ) that gives rise to triplicated interfering phases
UPPER MANTLE TRIPLICATIONS > Erdogan & Nowack, 1993, PAGEOP, 141, 1-24
TELESEISMIC P - 2 for slowness is single valued, monotonically decreasing function of (0.08 s/km to 0.04 s/km between 30 and 100 degrees near vertical propagation, less probability of critical reflection wavefront curvature small; adopt plane wave approximation
DEPTH PHASE COMPLICATIONS Depth phases dealt with in 2 ways: a) at shallow depths, depth phases have slowness similar to incident wave; consider part of source b) at greater depths, slowness differences increase but interference reduced through larger time separation and short source time functions Transition occurs at depths between 100-200 km
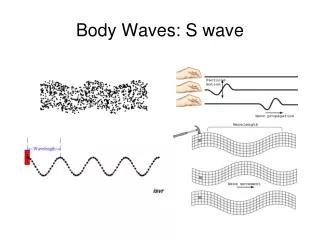
TELESEISMIC S Traditionally less useful owing to: more limited distance (slowness) range larger slownesses, closer to critical c) interference between S, SKS, ScS between 70-90 degrees d) variable source-side polarization imprint e) lower frequency content f) higher signal-generated noise levels
Farra & Vinnik, 2000, 141, 699-712 S-TELESEISMIC RECEIVER FUNCTIONS
S - Receiver Functions & the LAB • renewed interest in S owing to its utility in identifying shallow mantle discontinuities unobscured by the crustal reverberations Rychert et al, 2007
RECEIVER FUNCTIONS FROM REGIONAL P Park & Levin, 2001, GJI, 147, 1-11
Levin & Park, 2000, Tectonophysics, 323, 131-148 PKP - RECEIVER FUNCTIONS
SOURCE SIGNATURE SEPARATION & DECONVOLUTION
CONVOLUTIONAL MODEL - 1 • > : observed displacement seismogram • > : effective source (includes source-side scattering) • > : Green’s function (receiver side response to an impulsive plane wave with horizontal slowness )
CONVOLUTIONAL MODEL - 2 • > observation index; source index (implicitly assumed) • > separation of is canonical problem in seismology • > first step is ``modal decomposition’’: isolation of P, Sv, Sh contributions
MODAL DECOMPOSITION • > renders wavefield minimum phase • > 3 approaches: • 1. Cartesian Decomposition • 2. Covariance Eigenvector Decomposition • 3. 1-D Slowness Decomposition
CARTESIAN DECOMPOSITION • > for steeply propagating teleseismic waves, modal components are approximately separated on vertical and horizontal components • > Langston, 1979, JGR, 94, 1935-1951
EIGENVECTOR DECOMPOSITION • > rotate the particle motions to a coordinate system where maximum linear polarization is mapped to one component • > accomplished through diagonalization of the displacement covariance matrix, e.g. • > approximate (cf. plane waves in 1-D media) • > Vinnik, 1977, PEPI, 15, 39-45
P S PPP PPS PSS P PS OBLIQUE RAYPATHS/POLARIZATIONS IN 1-D
1-D SLOWNESS DECOMPOSITION • > assume 1-D media, then • where F is a fundamental matrix (e.g. Kennett, 1983, CUP) • > at free surface traction vanishes, so recast to recover upgoing wavefield
1-D SLOWNESS DECOMPOSITION • > leads to definition of free surface transfer matrix which for isotropic media is • > requires a priori knowledge of surface velocities and horizontal slowness; can be assessed by examination of first motions at time 0 • > Kennett, 1991, GJI, 104 153-163; cf. Svenningsen and Jacobsen, GRL, 31, doi:2004GL021413
P S PPP PPS PSS P PS SCATTERING GEOMETRY • > consider plane P wave incident from below • > receiver side scattering includes forward and back scattering, P and S • > legs ending in P and S isolated through modal decomposition
MINIMUM PHASE 1 • > 1-D, 2-layer isotropic model, impulsive source • > 1-D slowness decomposition exact • > note dominance of direct wave at early time • > assert that P-component is minimum phase
RECEIVER FUNCTIONS & DECONVOLUTION • Since P-component is minimum phase and dominated by direct wave at time 0, it can be used as an estimate of source time function and deconvolved from Sv, Sh components to produce estimate of S-contributions to Earth’s Green’s function
GREEN’S FN vs RECEIVER FN • > Receiver function is a leading order approximation to Green’s function • > P-component captures direct wave • > S-component captures 1st order scattered wavefield
IMPROVED RX FNS - MOTIVATION • S-component of P receiver function comprises conversions sensitive to combinations of , e.g. • P-component of P Green’s function contains information on , e.g. • improved estimate of Green’s function would allow tighter constraints to be applied to lithological interpretation, and would narrow the gap between active and passive source studies • Improved representation of Earth’s Green’s Function involves blind deconvolution
WATER-LEVEL DECONVOLUTION • > water-level deconvolution introduced by Clayton & Wiggins • > for small c approaches deconvolution, large c approaches scaled cross-correlation • > similar to damped least squares solution
SIMULTANEOUS DECONVOLUTION • > when large numbers of seismograms representing a single receiver/Green’s function are available, perform simultaneous, least-squares deconvolution • > advantageous due to fact that smaller sum of spectra in denominator reduce likelihood of spectral zeros allowing for smaller values of water level parameter to be used • > Gurrola et al, 1995, GJI, 120, 537-543
EXAMPLES - STATION HYB Kumar & Bostock, 2006, JGR, 111, doi:10.1029/2005JB004104
1-D INVERSION • > 3 categories: • 1. Least-squares inversion • 2. Monte Carlo / Directed Search • 3. Inverse Scattering
LEAST-SQUARES INVERSION • > receiver function inversion cast in standard inverse theory framework • > less expensive than MC/DS methods and makes less stringent demands on data than inverse scattering methods • > data insufficiency compensated for by regularization (e.g. damping) • > like MC/DS methods LS involves model matching so there is no formal requirement that data are delivered as Green’s functions (e.g. receiver function is adequate); only a forward modelling engine is strictly required
LEAST-SQUARES IMPLEMENTATION • > string receiver function or series of receiver functions end-to-end in vector d in either time or frequency domains and write as: • where is (non-linear) forward modelling operator operating on elasticity c • > can be represented through layer matrix methods (Haskell, 1962, JGR, 67, 4751-4767 - exact but expensive) or ray methods (Langston, 1977, BSSA, 67, 1029-1050 - cheap but incomplete)
LEAST-SQUARES IMPLEMENTATION • > address non-linearity in inverse problem by expanding receiver function as Taylor series about starting model • > rearrange, discard non-linear terms and write in matrix form as • where is data residual vector • is sensitivity matrix
LEAST-SQUARES IMPLEMENTATION • > solve in standard fashion with desired regularization, e.g. • and iterate until convergence to address non-linearity • > since receiver functions are sensitive to short-wavelength structure, generally taken to represent slowly/rapidly varying component of velocity model, respectively • > receiver functions often combined with surface wave dispersion data to constrain long wavelength structure
LEAST SQUARES EXAMPLE • Julia et al., 2000, GJI, 143, 99-112
MONTE CARLO / DIRECTED SEARCH • > feasible owing to high-performance computing and relatively few model parameters in 1-D inversions • > no need for derivative ( ) calculation, meaning one can define an arbitrary measure of misfit • > global in nature and so less apt to identify local misfit minima as solutions • > pure Monte Carlo rarely used since inefficient, rather use directed search algorithms: • 1. genetic algorithms • 2. nearest neighbour
GENETIC ALGORITHMS > begin with a population of models generated through an initial (uniform or random) sampling of model space • > employ evolutionary analogy wherein model parameters are encoded within binary strings (``chromosomes’’) • > model population allowed to evolve through iterations (``generations’’) by stochastic model selection based on goodness of fit, by recombination of models (through ``chromosomal splicing’’), and by random ``mutation’’ • > Goldberg, 1989, Genetic Algorithms in Search, Optimization and Machine Learning, Addison-Wesley, Reading, MA.
GA EXAMPLE Clitheroe et al., 2000, JGR, 105, 13697-13713
NEIGHBOURHOOD ALGORITHM • > begin with a population of models generated through an initial (uniform or random) sampling of model space • > employ an adaptive Voronoi cellular network to drive parameter search • > each iteration randomly samples the model space within cells occupied by the fittest models of the previous iteration • > algorithm focusses increasingly on regions of model space that come closer to satisfying data • > affords opportunity for both qualitative or quantitative appraisal of model space • > Sambridge, 1999, GJI, 138, 479-494
NA -SAMPLING Sampling after 100 points Initial random sampling Sampling after 500 points True Misfit Function • Sambridge, 1999, GJI, 138, 479-494
NA -INVERSION • Sambridge, 1999, GJI, 138, 479-494