Download
1 / 9
90 likes | 190 Vues
PIPE CRAWLER FOR THE REMOVAL OF RADIOACTIVE PLUGS. Team 14 Lee Brady ∙ Jose Matos ∙ Brian Posse Advisor Dr. Sabri Tosunoglu Project Feasibility Presentation January 14, 2010. Problem Statement.

E N D
PIPE CRAWLER FOR THE REMOVAL OF RADIOACTIVE PLUGS Team 14 Lee Brady ∙ Jose Matos ∙ Brian Posse Advisor Dr. Sabri Tosunoglu Project Feasibility Presentation January 14, 2010
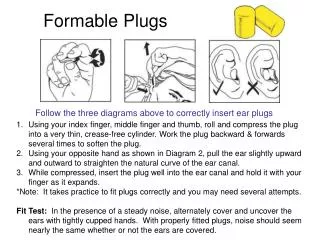
Problem Statement • A Pneumatic Crawler will remove clogs that delay the U.S. Department of Energy operations as they transfer millions of gallons of highly radioactive sludge and slurry from leaking single-shell tanks to more secure double-shell tanks at national sites.
Design Metrics • Crawler and components must: • Fit in a pipe having inner diameter of 3”. • Negotiate through 90˚ bends w/ turning radius of 4.25”. • Be able to pull its own weight including weight of tether. • Be radiation hardened. • Be capable of removing clogs that exist in pipelines.
Evaluation of Prototype • Functionality • Proper programming of time intervals on inflation/deflation cycles and the mitigation of any leaks of pressurized fluid will be controlled in this stage. • Force • Record the maximum pulling force that can achieved by adjusting the pressure and vacuum settings in each air cavity.
Evaluation of Prototype • Agility • The unit will be tested for its ability to complete a designed test-bed consisting of straight sections and elbows. • Speed • This test will provide the estimated time that will take for the unit to reach a plug. • Unplugging Capability • The effectiveness of the abrasive tool attachments to unplug simulant plugs will be studied.
Prototype Controls and Functions • Pneumatic Controls • Compressed Air • Vacuum Lines • 3 S0lenoid Valves • PICKit • Hydraulic Controls • Electric Pressure Washer • Abrasive Tool Plug
Conclusion • Construct a pneumatic crawler for the removal of radioactive clogs w/ removal tool powered by hydraulics • Prototype Testing • Study of pneumatic sequencing and pressures/vacuums • Effectiveness of unclogging tools