Download
1 / 12
120 likes | 227 Vues
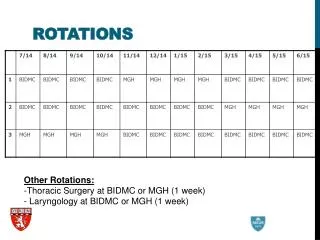
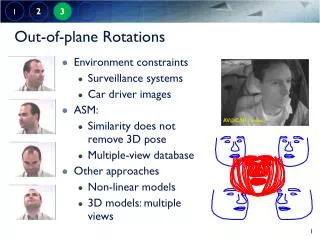
2. 1. 3. Out-of-plane Rotations. Environment constraints Surveillance systems Car driver images ASM: Similarity does not remove 3D pose Multiple-view database Other approaches Non-linear models 3D models: multiple views. AV@CAR Database.

E N D
2 1 3 Out-of-plane Rotations • Environment constraints • Surveillance systems • Car driver images • ASM: • Similarity does not remove 3D pose • Multiple-view database • Other approaches • Non-linear models • 3D models: multiple views AV@CAR Database
Geometric operations by means of linear algebra 2D points are 3-component vectors Multiple views of the same planar object can be related by homographies 2 1 3 Projective Geometry 1 2 3 4
2 1 3 Homographies • Homographies hold both for object or camera movements • The points must be coplanar H
2 1 3 Coplanar face model • Silhouette points are excluded (out of main plane) • Half the nose points are excluded (easy occlusion) • First iteration: At least 8 correspondences to compute H (4 2D-points) Model Coordinates Image Coordinates
ASM Image Model (Similarity) Gradient normal to the shape contour Projective transformations Do not preserve angles nor distance relationships 2 1 3 Image Matching H
2 1 3 AV@CAR Database (40 people)
2 1 3 Results ASM • Training and test on multi-view data • Cross validation PASM
2 1 3 Comparison to related work Ratios with respect to error on frontal images
2 1 3 Results training just a single view (frontal) • Training set: Frontal • Test set: Multilple views
2 1 3 Analysis of the single-view case
2 1 3 Conclusions on PASM • If multi-view dataset available • Almost invariant to rotations up to 60 degrees • Training only on frontal views • Considerably reduces (50%) variation of ASM due to viewpoint • Left-right rotations better handled than up-down nodding • Very difficult to compare to other results • Points used for alignment can affect performance • Not considerable for expected ASM precision
2 1 4 3 How reliable is the result?