More About Inverse Problems: Another Example
This article explores the complexities of measuring the density of a hand specimen through mass and volume. It emphasizes that the calculated density may be influenced by various errors in measurements, notably systematic, modeling, and random errors. We delve into the concept of conditional probability and how it relates to evaluating the accuracy of our measurements. The text also discusses the importance of a priori models in geophysics, providing insights into the true density estimation and its inherent uncertainties.

More About Inverse Problems: Another Example
E N D
Presentation Transcript
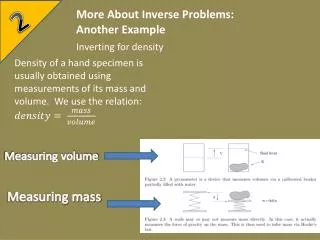
2 More About Inverse Problems: Another Example Inverting for density Density of a hand specimen is usually obtained using measurements of its mass and volume. We use the relation: Measuring volume Measuring mass
Errors or Noise Our question is what is the density of the hand specimen? The answer is readily obtained by dividing the measured mass by the measured volume. This could be an end to short tale, but is this really the end?!! The answer is NO!!. All of us understand that in physics lab experiment of calculating the acceleration due to gravity (as an example) that our results are not, for most cases, the same. Here an important factor arise which is the errors or noise in our measurements. Now we have many answers for our question.
More about Errors In our example let’s suppose that volume measurement are error free and that we consider only errors in mass measurements. The figure shows the probabilty of measuring mass in our example. It reflects the frequency distribution of single variable (mass) where the actual value is supposed to receives the highest frequency.
Types of Errors • We have several types of errors that affects our measurements. These types are: • Systematic errors that occurs due to instrument position or calibrations problem. In this case our measurements are increased or decreased by certain amount. • Modeling Error which depends on our initial assumptions. Usually we regard our model as ideal one for simplifying the calculation. For example the assumption of constant seismic velocity for a layer. • Random error that arise due to many sources like wind blow during seismic data acquisition
Conditional Probability In probability theory, a conditional probability is the probability that an event will occur, when another event is known to occur or to have occurred. If the events are A and B respectively, this is said to be "the probability of A given B". It is commonly denoted by P(A|B), or sometimesPB(A). P(A|B) may or may not be equal to P(A), the probability of A. If they are equal, A and Bare said to be independent. For example, if a coin is flipped twice, "the outcome of the second flip" is independent of "the outcome of the first flip". (from wikipedia) mathematically
In our example: How to get rTfrom number of observations rO ?
PT|O Measuring the mass of a specimen say 100 times or obtaining 100 specimens one by one may give a probability distribution that looks like the one below. The true mass may be obtained by taking the average of observations. This reduces the random errors as averaging causes random errors to cancel each other.
As the scale is noisy we have to express our knowledge of the true density as a distribution showing the probability that the true density has some vale given that the observed density has another value. A common distribution is the Gaussian distribution.
A priori model In most of the problems we tackle in geophysics we usually have some information about the nature of the solution we are looking for, this information is called A priori model or values. In the light of the A priori, the answer to the problem at hand may be discussed as either: 1- The true density is known. This case is not usually adopted and given here for theoretical discussion. 2- Constrained, where we know that the true density lie between two values.
Case one Case Two