An Introduction to Compressive Sampling Theory in Signal Recovery
This introduction explores the concepts of compressive sampling and sparse signal recovery, discussing critical theorems related to the accurate reconstruction of signals from compressed data. The work highlights the importance of selectively ignoring smaller coefficients while maintaining essential information in signals. The three theorems presented shed light on the conditions for effective sparse recovery, particularly under noise influences and the Restricted Isometry Property (RIP). The conclusion summarizes the necessity of representing nonsparse signals in a sparse manner for effective processing.

An Introduction to Compressive Sampling Theory in Signal Recovery
E N D
Presentation Transcript
An Introduction To Compressive Sampling Advisor: 王聖智 教授 Student: 林瑋國
outline • Introduction • Sparse signal recovery • Theorem 1 • Theorem 2 • Theorem 3 • Summary
outline • Introduction • Sparse signal recovery • Theorem 1 • Theorem 2 • Theorem 3 • Summary
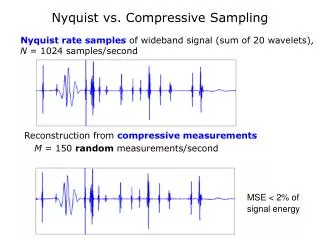
Introduction(1) • The signal can be present by the basis • Sometimes we can ignore the smaller coefficients and also can maintain the main information
Introduction(2) • Example:
Introduction(3) • We have the value “zero” and maybe we don’t send the value “zero” • But the received doesn’t know the position of zero • Someone thinks maybe we can compress the data
Introduction(4) • We use compress the data to Y • The received have the Y and use to recover the data X
Introduction(5) • There are many solutions of (1)
outline • Introduction • Sparse signal recovery • Theorem 1 • Theorem 2 • Theorem 3 • Summary
Theorem 1 • Theorem 1 • Selecting A uniformly from m by n matrix If for some positive constant C , the solution of (2) is exact with overwhelming probability
Theorem 2(1) • If the n by n matrix M satisfys the matrix has the “isometry” property
Theorem 2(2) • Restricted Isometry Property (RIP) s s s
Theorem 2(3) • If the RIP holds, then the following linear program gives an accurate reconstruction • Theorem 2 Assume then the solution of (3) obeys s
Theorem 3(1) • Sometimes the sparse recovery has to deal with noise • Thus we have to solve the problem
Theorem 3(2) • If the RIP holds, then the following linear program gives an accurate reconstruction • Theorem 3 Assume then the solution of (4) obeys
outline • Introduction • Sparse signal recovery • Theorem 1 • Theorem 2 • Theorem 3 • Summary
Summary • The Theorem1-3 has to use on the S-sparse vector • But the signal sometimes isn’t sparse vector and we have to represent by S-sparse vector • Then