Rescue Robot Project
Rescue Robot Project. Project overview. Modular components to be re-used in future years Tasks and Team Robot graphical user interface ( Zwivhuya Tshitovha ) Robot control interface ( Jaco Colyn ) Robot visual system (Jonathan Dowling)


Rescue Robot Project
E N D
Presentation Transcript
Project overview • Modular components to be re-used in future years • Tasks and Team • Robot graphical user interface (ZwivhuyaTshitovha) • Robot control interface (JacoColyn) • Robot visual system (Jonathan Dowling) • 8 Masters students working in the Robotics and Agents lab
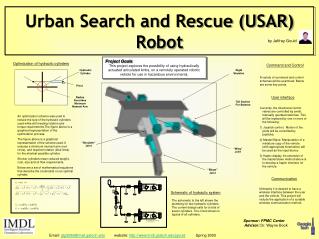
Importance of Research • Reduce risk for rescue workers • Map generation • Rescue tasks • Detection and localisation of victims • Detection of hazardous materials • Disasters that have used robots: • Japan nuclear disaster • Three Mile Island nuclear disaster • World Trade Centre terrorist attack
Rescue robots in disasters • Usage in Japan nuclear disaster • And in the World Trade Centre
Rescue robots in disasters • World trade centre (continued)
Research Questions • How can an effective system be built to automatically detect simulated disaster zone objects? • human victims • hazmat signs • rolling E’s • Using the normal IR cameras available on the robot and • Applying existing computer vision techniques to extract the features
Research Questions • How can a usable and efficient GUI be built by hiding information and preventing sensory overload?
Research Questions • How can an intuitive robot control system be created by mapping the robots functions onto a human interface device?
RoboCup Rescue Robot overview • RoboCup – an international organisation based in Sweden • Urban search and rescue tests
Tests and Competitions • Simulate human subjects and disaster environments • Robot vision tests • Rolling E’s • Hazmat signs • Victim detection • Remote operation of robot through competition arena to carry out tasks such as retrieving an object
Deliverables • Client for software engineering project: Stephen Marais from Robotics and Agents Lab • The deliverables required for this project are: • A visual system for the robot to be able to pass the “rolling E’s” test • Hazardous material signs detection • Human victim detection • Easy to use interface for controlling the robot via a human interface device • Intelligent graphical user interface that highlights only important information to the operator
Goals and challenges: Robot Control InterfaceGraphical User Interface
Fundamental Robot Control Goals • Driving the robot • Controlling the robotic arm • Adjusting the robots tracks
Prevent Operator Mistakes • No direct line of sight to the robot • Robot is “on its own” • Has to return by itself • Prevent • Falling over • Driving out of range
Robot Control Challenges • Efficient control • Single Teleoperator • Reduce fatigue • Interpret and perform commands in real time • Reduce input delay “lag” • Efficient mapping of commands to the control interface Micire, M., Mccann, E., Desai, M., Tsui, K.M., Norton, A., and Yanco, H.A. Hand and Finger Registration for Multi-Touch Joysticks on Software-Based Operator Control Units. (2011), 88-93.
Graphical User Interface challenges • Designing a “clean” Graphical User Interface (GUI) • Reducing sensory overload – which leads to fatigue • Relay locations of important objects that cannot be directly seen • Only seen through the control interface and GUI • Interface must provide situational awareness
Robot Control Interface RC & GUI • Iterative and Incremental software engineering. • Human Computer Interaction (HCI) • Human Robot Interaction (HRI) • Use case scenarios taken from Urban Rescue Scenarios
Goals and challenges: Robot Vision(RV)
Fundamental RV goals • Detect Human body parts (primarily limbs) • Detect and identify Hazmat signs • Detect the “rolling-E”
Robot vision system • Input stream of video • The general procedure • Transform the image’s data into a simpler representation • Apply a machine learning algorithm onto the transformed data to detect features.
Testing • Robot control interface and GUI • User centred design approach. • Qualitative and Quantitative results • Feedback can be generated from • Test subjects • Asked to complete specific tasks using the interface. • Performance measurements and quantitative results from simulation testing. • Hazmat signs • Human body parts • Rolling “E”
Testing • Requirements • RoboCup Rescue Competition (RRC) • Urban Search and Rescue • Initial testing on each sub-system • Final testing on the system as a whole • Based on expected challenges in the RRC
Ethical, Professional and Legal Issues • Demonstrate its capabilities on dummies • No external users because robot quite expensive • Ethical clearance
Related Work • Robot vision • Mikolajczyket al [1] • Robot control and Interface • Richer et al [2] • Adams [3]
Related Work cont... • Team Description Papers 2003 • Team RoBrno [4]
Resources • Hardware • 19 inch wide screen • Robot • Human interface device • Software • OpenCV • Bosch SDK • ROS
Risks • Accessing the robot • Robot hardware damage • Missing project milestones
Anticipated Outcomes • System used for a rescue robot that is developed by the Robotics and Agents Research Laboratory. • Key success factors • Robot vision -- Accurate detection in smallest time • Robot interface and control -- Usable and efficient given by measure of time and effort
References • [1] Mikolajczyk, K,Schmid, C & Zisserman ,A 2004, „Human detection based on a probabilistic assembly of robust part detectors‟ . European Conference on Computer Vision, Oxford, United Kingdom. • [2] Adams, JA 2002,‟Critical Considerations for Human-Robot Interface Developmen‟, Proceedings of 2002 AAAI Fall Symposium, 2002 - aaai.org, Rochester Institute of Technology Rochester, New York. • [3] Richer, J & Drury, JL 2006 „A Video Game-Based Framework for Analyzing Human-Robot Interaction ‟, Characterizing Interface Design in Real-Time Interactive Multimedia Applications. MITRE Corporation, United states of America • [4] Uschin, K, Inteam, S, Sae-eaw,N, Trakultongchai, A, Klairith, P, Jitviriya, W & Jenkittiyon , P,‟ RoboCup Rescue 2009 - Robot League Team iRAP_Pro (Thailand)‟,King Mongkut‟s University of Technology North Bangkok (KMUTNB) , Bangkok Thailand.