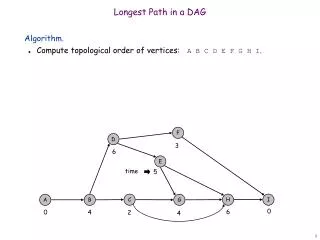
Topological Path Planning: Landmarks, Routes, and Navigation Strategies
180 likes | 209 Vues
This chapter discusses the usage of natural and artificial landmarks, relational and associative spatial memory, topological maps, and distinct place approaches in topological path planning. It provides insights into gateway labeling, local control strategies, and the importance of image signatures in route planning. The summary highlights the distinctions between qualitative relational and associative navigation methods, emphasizing the significance of landmarks in path planning and navigation. This chapter serves as a comprehensive guide for understanding and implementing topological path planning strategies for robots.

Topological Path Planning: Landmarks, Routes, and Navigation Strategies
E N D
Presentation Transcript
Part II Chapter 9:Topological Path Planning Chapter 9: Topological Path Planning
Objectives • Define the difference between natural and artificial landmarks; give one example of each • Given a description of an indoor office environment and a set of behaviors, build a relational graph representation labeling the distinctive places and local control strategies for gateways • Describe in one or two sentences: gateway, image signature, visual homing, viewframe, orientation region • Given a figure showing landmarks, create a topological map showing landmarks, landmark pair boundaries, and orientation regions Chapter 9: Topological Path Planning
Behaviors Behaviors Behaviors Behaviors Navigation • Where am I going? Mission planning • What’s the best way there? Path planning • Where have I been? Map making • Where am I? Localization Carto- grapher Mission Planner deliberative How am I going to get there? reactive Chapter 9: Topological Path Planning
Spatial Memory • What’s the Best Way There? depends on the representation of the world • A robot’s world representation and how it is maintained over time is its spatial memory • Attention • Reasoning • Path planning • Information collection • Two forms • Route (or qualitative) • Layout (or metric) • Layout leads to Route, but not the other way Chapter 9: Topological Path Planning
Route, or Qualitative Navigation Two categories Relational spatial memory is a relational graph, also known as a topological map use graph theory to plan paths Associative spatial memory is a series of remembered viewpoints, where each viewpoint is labeled with a location good for retracing steps
Topological Maps Use Landmarks • A landmark is one or more perceptually distinctive features of interest on an object or locale of interest • Natural landmark: configuration of existing features that wasn’t put in the environment to aid with the robot’s navigation (ex. gas station on the corner) • Artificial landmark: set of features added to the environment to support navigation (ex. highway sign) • Roboticists avoid artificial landmarks! Chapter 9: Topological Path Planning
Example Landmarks Chapter 9: Topological Path Planning
floor plan Gateway is an opportunity to change path heading relational graph Relational Methods Nodes: landmarks, gateways, goal locations Edges: navigable path
Kuipers and Byun: Spatial Hierarchy Chapter 9: Topological Path Planning
Distinctive Place Approach Local control strategies (behaviors to get robot between DPs) Distinctive Places (recognizable, & at least locally unique) Chapter 9: Topological Path Planning
neighborhood boundary distinctive place (within the corner) path of robot as it moves into neighborhood and to the distinctive place Actually Getting to a Distinctive Place: Neighborhoods Use one behavior until sees the DP (exteroceptive cueing) then swap to a landmark localization behavior
de3 r1 r2 fh mtd mtd Room 1 Room 2 t1 fh t2 fh t3 fh de1 mtd mtd fh r4 r3 Room 3 Room 4 de2 Class Exercise • Create a relational graph for this floorplan • Label each edge with the appropriate LCS: mtd, fh • Label each node with the type of gateway: de, t, r Chapter 9: Topological Path Planning
Associative Methods • Visual Homing • bees navigate to their hive by a series of image signatures which are locally distinctive (neighborhood) • QualNav • the world can be divided into orientation regions (neighborhoods) based on perceptual events caused by landmark pair boundaries • Assumes perceptual stability, perceptual distinguishability Randal Nelson, URochester Daryl Lawton, Advanced Decision Systems Chapter 9: Topological Path Planning
Image Signatures Tesselated (like faceted-eyes) The world Resulting signature for home Chapter 9: Topological Path Planning
Move to match the template Chapter 9: Topological Path Planning
OR2 OR1 Topological Representation as Orientation Regions mountain Metric Map building radio tower tree
Summary • Route, qualitative, and topological navigation all refer to navigating by detecting and responding to landmarks. • Landmarks may be natural or artificial; roboticists prefer natural but may have to use artificial to compensate for robot sensors • There are two type of qualitative navigation: relational and associative Chapter 9: Topological Path Planning
Summary (cont.) • Relational methods use graphs (good for planning) and landmarks • The best known relational method is distinctive places • Distinctive places are often gateways • Local control strategies are behaviors • Associative methods remember places as image signature or a viewframe extracted from a signature • can’t really plan a path, just retrace it • direct stimulus-response coupling by matching signature to current perception Chapter 9: Topological Path Planning